

ヤマト運輸 × CycloTech「CCY-01」の核心技術を、流体力学の数式とともに解説
ドローンで重い荷物を運ぶ。聞くだけなら簡単そうですが、都市部でそれを安全に、静かに、しかも強風のなかで実現しようとすると、従来のクアッドコプターでは根本的な壁にぶつかります。
その壁を物理学の原理から打ち破ろうとしているのが、ヤマト運輸とオーストリアのCycloTech社が共同開発する貨物ドローン「CCY-01」に搭載されたサイクロローター(Cyclorotor)という推進システムです。
本シリーズ(全5回)では、この技術を流体力学の数式に基づいて厳密に解説しつつ、その数式が「要するに何を意味しているのか」を、専門家でなくても分かるようにお伝えします。第1回の今回は、サイクロローターの構造と、推力を生み出す基本原理を解き明かします。
1. 従来型ドローンの3つの構造的限界
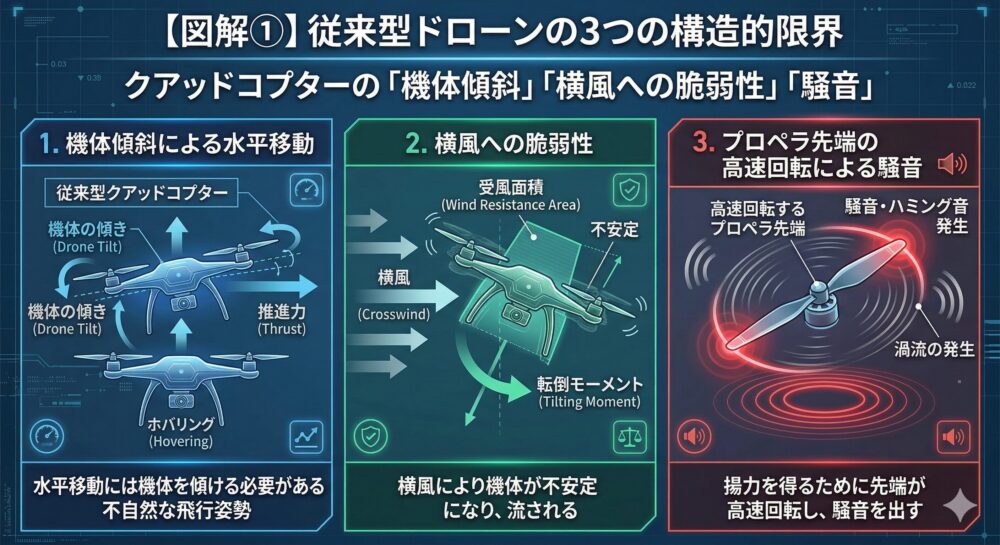
なぜ、わざわざ新しい推進システムが必要なのでしょうか。まず、従来のマルチローター型ドローン(クアッドコプター等)が抱える3つの本質的な弱点を確認しておきましょう。
弱点① 前に進むために、機体を傾けなければならない
クアッドコプターのプロペラは機体に固定されており、推力は常に機体に対して垂直方向に発生します。前に進みたいときは、機体全体を前方に傾けて、推力の一部を水平成分に振り向けるしかありません。これは搭載した貨物に物理的なストレスをかけ、荷崩れのリスクを生みます。
弱点② ビル風や突風に弱い
都市部の高層ビル群の間では、予測困難なビル風やウインドシアが発生します。機体を傾けて姿勢を制御するメカニズムでは、横風への応答速度に限界があり、強風時にはビルの屋上への精密な着陸が困難になります。
弱点③ 不快な高周波騒音
プロペラの先端は音速に近い速度で回転しており、「ブーン」という不快な高周波ノイズを発生させます。この騒音は、ドローン物流の都市部での社会的受容性を大きく損なう要因です。
2. サイクロローターとは何か ── 船舶推進器から空へ
サイクロローターの原理は、実は航空技術ではなく船舶技術に起源を持ちます。1920年代にオーストリアの技術者が開発した「フォイス・シュナイダー・プロペラ(Voith Schneider Propeller)」という推進器が、その直系の祖先です。
この推進器は、船底から水中に突き出した円筒の周囲に複数のブレード(板状の翼)を配置し、それらを回転させながら各ブレードの角度を巧みに変化させることで、船を任意の方向に動かすことができます。タグボートや掃海艇など、極めて高い操縦性が求められる船舶で100年近く使われてきた実績ある技術です。
CycloTech社は、この水中で実証済みの原理を空中で動作するように最適化しました。それが「サイクロローター」です。
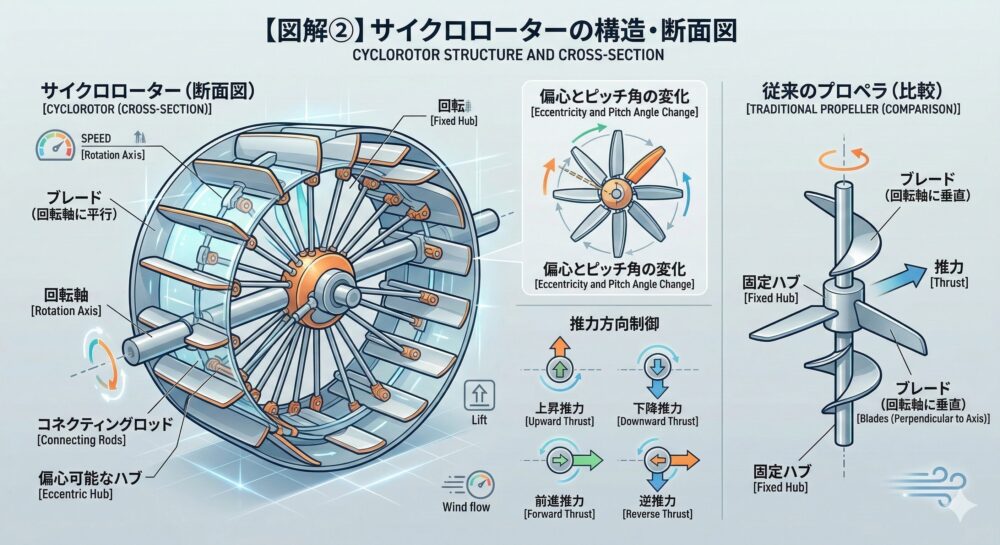
【図解②】サイクロローターの構造・断面図
回転軸に平行に配置された複数のブレード、中心のハブ(偏心可能)、コネクティングロッドの構造を
断面図で示す。従来のプロペラ(回転軸に垂直なブレード)との構造比較を並置
構造の核心:「回転しながら翼の傾きを変え続ける」
サイクロローターの構造を一言でまとめると、「回転軸に平行に配置された複数のブレードが、円筒状の軌道を描きながら回転し、1回転のあいだにブレードの傾き(ピッチ角)を連続的に変化させる」という仕組みです。
各ブレードはコネクティングロッド(コンロッド)を介して中心のハブに機械的に接続されています。このハブを回転軸の中心から意図的に偏心(ずらす)させることで、ブレードのピッチ角が1回転ごとに周期的に変わります。
3. 数式で読み解く:ブレードのピッチ角はどう変わるのか
では、この「1回転のあいだにブレードの傾きが変わる」という動きを、数式で正確に記述してみましょう。
円軌道上の位置を方位角 θ(シータ)で表します。θ = 0° を軌道の右端(3時の位置)とすると、ブレードが位置 θ にあるときのピッチ角 α(アルファ)は、次の式で表されます。
$$ \alpha(\theta) = \alpha_{\max} \cdot \sin(\theta + \varphi) $$
式(1):ブレードピッチ角の周期的変動
各記号の意味は次のとおりです。
| 記号 | 意味 | 何で決まるか |
|---|---|---|
| $$\alpha(\theta)$$ | 方位角 θ でのブレードのピッチ角 | ハブの偏心量と位置で自動的に決まる |
| $$\alpha_{\max}$$ | ピッチ角の最大振幅 | ハブの偏心量(大きくずらすほど大きくなる) |
| $$\varphi$$ | 位相角 | ハブの偏心方向(推力の向きを決める) |
| $$\theta$$ | ブレードの方位角 | 回転とともに 0°→360° へ連続変化 |
💡 直感的な意味
扇風機の羽根を1本だけ持って、腕を大きく円を描くように回すことを想像してください。上半分を通過するときは羽根を「下向きに傾けて」空気を下に押し、下半分では傾きを反転してやはり空気を下に押す。すると1回転のあいだ、常に下向きの風が生まれ、その反作用で上向きの力(揚力)が発生します。
sin関数で表されるということは、ブレードの傾きが滑らかに、波のように揺れ動いているということ。急に角度が変わるのではなく、正弦波のように自然に変化するから、空気の流れもスムーズに制御できるのです。
📈
【図解③】ブレードのピッチ角変化グラフ
横軸を方位角 θ(0°〜360°)、縦軸をピッチ角 α として、
sin波状のピッチ変化を描画。軌道上の6ポイント(0°, 60°, 120°, 180°, 240°, 300°)での
ブレード姿勢を小さな翼断面図で並べるアニメーション的イラスト
4. 推力ベクトル制御:なぜ360度自在に向きを変えられるのか
式(1)の中で、最も重要なパラメータが位相角 φ(ファイ)です。
この φ は、ハブの偏心方向を変えるだけで動的に制御できます。そして、φ の値を変えると、sin波の「山」と「谷」が回転軌道上でずれるため、空気を押し出す方向が変わり、結果として推力ベクトルの向きが変わります。
ここが革命的なポイント
ローターの回転数(RPM)を変えなくても、ハブの偏心方向(φ)を変えるだけで、推力の向きを360°任意の方向へミリ秒単位で切り替えられる。機体を傾ける必要は一切ない。
さらに、ハブの偏心量を変えれば、$$\alpha_{\max}$$ が変わり、推力の大きさ(マグニチュード)も制御できます。つまり、サイクロローターは1つの制御機構(偏心ハブ)だけで、推力の「大きさ」と「方向」の両方を独立に制御しているのです。
🎯
【図解④】推力ベクトル制御の仕組み
ハブの偏心位置を4方向(上・右・下・左)に変えたときの
ピッチ角 sin波の位相シフトと、それに対応する推力方向の変化を
4パネルのビフォー・アフターで示す図解
5. ブレードが経験する「風」を数式で表す
サイクロローターのブレードは円軌道上を高速で公転しています。このとき、各ブレードが実際に「感じる」風(局所的な流入速度)は、自らの公転運動と機体全体の前進速度の合成によって決まります。
ローターの回転角速度を $$\Omega$$(オメガ)、回転半径を $$R$$ とすると、ブレードの公転速度は次のように表せます。
$$ V_{\text{rot}} = \Omega R $$
式(2):ブレードの公転速度
機体の前進速度を $$V_\infty$$ とすると、方位角 θ にあるブレードが経験する局所流入速度 $$V_{\text{local}}$$ は、次のベクトル合成で求められます。
$$ V_{\text{local}}(\theta) = \sqrt{(\Omega R + V_\infty \sin\theta)^2 + (V_\infty \cos\theta)^2} $$
式(3):ブレードの局所流入速度
💡 直感的な意味
メリーゴーラウンドに乗りながら、そのメリーゴーラウンド全体がトラックの荷台に載って走っている状況を想像してください。あなたが感じる風は、「自分がぐるぐる回る速度」と「トラックが走る速度」が合わさったものです。
回転の前面(トラックの進行方向と同じ向きに動く位置)では風が強くなり、背面(逆方向に動く位置)では弱くなる。この不均一な風が、サイクロローター特有の非定常空気力学を生み出す源泉です。
ここで、前進速度と公転速度の比を「前進比(Advance Ratio)」と呼び、次のように定義します。
$$ \mu = \frac{V_\infty}{\Omega R} $$
式(4):前進比
ホバリング時は前進速度がゼロなので $$\mu = 0$$ となり、式(3)は $$V_{\text{local}} = \Omega R$$(一定)に簡略化されます。前進飛行するほど $$\mu$$ が大きくなり、ブレードが経験する流入速度の不均一さが増大していきます。この前進比は、サイクロローターの空力特性を左右する極めて重要な無次元パラメータです。
6. ブレードが生む力 ── 揚力と抗力の基本式
各ブレードが局所流入速度 $$V_{\text{local}}$$ のもとで生み出す空気力学的な力は、古典的な揚力・抗力の式で記述されます。
$$ dL = \frac{1}{2}\,\rho\, V_{\text{local}}^2 \cdot c \cdot C_L(\alpha)\, ds $$
$$ dD = \frac{1}{2}\,\rho\, V_{\text{local}}^2 \cdot c \cdot C_D(\alpha)\, ds $$
式(5):微小要素の揚力 dL と抗力 dD
| 記号 | 意味 | 単位 |
|---|---|---|
| $$\rho$$ | 空気密度(海面高度で約 1.225) | kg/m³ |
| $$V_{\text{local}}$$ | ブレードの局所流入速度(式3) | m/s |
| $$c$$ | ブレードのコード長(翼弦長) | m |
| $$C_L(\alpha)$$ | 迎え角 α に依存する揚力係数 | 無次元 |
| $$C_D(\alpha)$$ | 迎え角 α に依存する抗力係数 | 無次元 |
| $$ds$$ | スパン方向(翼幅方向)の微小要素 | m |
💡 直感的な意味
車の窓から手を出して風を受ける経験を思い出してください。手の傾きを変えると、手を持ち上げる力(揚力)の強さが変わります。この式は、「風が速いほど、翼が大きいほど、そして翼の傾きが効果的なほど、大きな力が生まれる」ということを数学的に表現したものです。
特に重要なのは、速度の2乗に比例する点。風速が2倍になれば力は4倍になります。サイクロローターのブレードは高速で公転しているため、この「速度の2乗効果」により、小さなブレードでも大きな力を生み出せるのです。
7. 全ブレードの力を足し合わせる ── 正味の推力
個々のブレードが生む揚力 dL と抗力 dD を、ローター全体の座標系に投影し、全ブレード $$N_b$$ 枚分を1回転(0〜2π)にわたって積分すると、ローター全体が生み出す正味の推力が得られます。
$$ F_{\text{thrust}} = \frac{N_b}{2\pi} \int_0^{2\pi} \left[\, dL(\theta)\cos\theta – dD(\theta)\sin\theta \,\right] d\theta $$
式(6):サイクロローターの正味推力
💡 直感的な意味
この式は「全ブレードが1周する間に生んだ力のうち、上向き成分だけを抜き出して合計する」と読みます。
各ブレードは円軌道のいろんな位置で力を生んでいますが、すべての力が上向きに揃っているわけではありません。cos θ と sin θ で「上向き成分」に変換してから足し合わせることで、「差し引きで機体を浮かせる正味の力」が計算されるのです。
イメージとしては、ボート競技でクルー全員がオールを漕ぐとき、各人のタイミングと角度がバラバラなら船はうまく進みませんが、全員が同期して最適な角度で漕げば、強力な推進力が生まれる──サイクロローターのブレードは、まさにこの「完璧に同期した漕ぎ手」として機能しています。
⚙️
【図解⑤】正味推力の生成メカニズム
円軌道上の6つのブレード位置について、各位置での揚力ベクトル(dL)を矢印で示し、
cos θ で射影した「上向き成分」を色分けで可視化。
それらを合計して中央に大きな上向き矢印(正味推力)として描く図解
8. サイクロローターの隠れた強み ── スパン方向の均一な流速分布
サイクロローターがもう一つ持っている、見落とされがちだが極めて重要な利点があります。それはブレードのスパン方向(翼幅方向)に流入速度が均一であるという性質です。
従来のスクリュープロペラでは、ブレードは回転軸に垂直に取り付けられているため、中心(ハブ)に近い部分はゆっくり、先端(チップ)は高速で動きます。このため、動圧 q は半径 r の2乗に比例して増大します。
$$ q(r) = \frac{1}{2}\rho\,(\Omega r)^2 \quad \therefore\; q \propto r^2 $$
式(7):プロペラのスパン方向動圧分布
この不均一さを補正するために、プロペラのブレードは中心から先端にかけて複雑なねじり(Twist)やテーパーを施す必要があります。
対照的に、サイクロローターのブレードは回転軸に平行に配置されています。どの断面を取っても、ブレードと空気の相対速度はほぼ同じです。
$$ V_{\text{local}}(y) \approx \text{const.} \qquad (y:\text{スパン方向座標}) $$
式(8):サイクロローターのスパン方向流速分布
💡 直感的な意味
プロペラは「扇形の羽根」なので、中心はゆっくり、先端は猛スピードで動きます。この不均一さが設計を複雑にし、効率を下げます。
一方、サイクロローターは「回転寿司のレーン」のようなもの──どの位置の皿(ブレード断面)も同じ速度で流れています。この均一性のおかげで、ブレード全体を単純かつ最適な形状で設計でき、結果としてエネルギー効率も高まるのです。
📊
【図解⑥】スパン方向の動圧分布の比較
左:プロペラの動圧分布(放物線状、中心で0、先端で最大)
右:サイクロローターの動圧分布(ほぼフラットな直線)
ブレード断面をオーバーレイして視覚的に比較
9. 第1回のまとめ
本記事で解説した内容を、数式と対応づけて整理します。
| 物理現象 | 数式 | 一言でいうと |
|---|---|---|
| ブレードのピッチ角変動 | $$\alpha(\theta) = \alpha_{\max}\sin(\theta+\varphi)$$ | 1回転ごとに翼の傾きが波のように変わる |
| 局所流入速度 | $$V_{\text{local}}(\theta)$$(式3) | 公転と前進の「合成風」をブレードが感じる |
| 前進比 | $$\mu = V_\infty / \Omega R$$ | 前進速度と回転速度のバランスを示す指標 |
| 揚力・抗力の生成 | $$dL = \frac{1}{2}\rho V_{\text{local}}^2\, c\, C_L\, ds$$ | 風速の2乗×翼の大きさ×傾き効率=力 |
| 正味推力 | $$F_{\text{thrust}}$$(式6の積分) | 全ブレードの上向き成分を1周分足し合わせる |
| スパン方向均一性 | $$V_{\text{local}}(y) \approx \text{const.}$$ | ブレード全体が同じ速度で風を受ける |
第1回の核心
サイクロローターは、ハブの偏心という単純な機械機構によって推力の「大きさ」($$\alpha_{\max}$$)と「方向」(φ)を独立に制御し、機体を一切傾けずに360度任意の方向へ瞬時に推力を発生させる。さらにスパン方向の均一な流速分布により、ブレード設計がシンプルで高効率になる。
NEXT ARTICLE ── 第2回
「なぜ小さいのに強力か ── 動的失速と非定常揚力の物理学」
第2回では、サイクロローターが小型でありながら驚異的な推力を発揮するメカニズムの核心に迫ります。「動的失速(ダイナミックストール)」という現象をブレードが意図的に利用し、通常の翼の限界を超える揚力を引き出す物理学を、換算周波数(Reduced Frequency)やナビエ・ストークス方程式とともに解説します。

コメント