

1. 「荷物を積んだら、なぜか機体が傾いて落ちました」——その一言が終わらせるもの
農薬散布ドローンの運用中に、こんな事故報告が上がってくる。
「散布開始直後は安定していたのですが、タンク内の農薬が半分ほどになったあたりから、機体が左右に不規則に揺れ始め、最終的にコントロールを失って圃場に墜落しました。」
あるいは、物流ドローンの実証実験で——
「離陸時は正常だったが、配送先上空でホバリングに移行した際、機体が急に前のめりになり、自動着陸シーケンスが正常に作動せず、荷物もろとも落下した。」
これらの事故には、共通する物理的原因がある。重心(Center of Gravity:CG)の動的変位だ。
航空局の審査官は、特に農薬散布や物資配送など「ペイロードが変化する飛行」の申請に対して、こう問い詰めてくる。
「飛行中にタンク内の液体が揺れた場合、あるいは吊り下げた荷物が振り子運動をした場合、機体の重心位置はどのように変化し、それが姿勢制御にどの程度の外乱を与えるか、定量的に評価していますか?」
この質問に答えられない事業者は、許可を得られない。それどころか、重心管理を怠った結果として墜落事故が発生した場合、「予見可能な危険を放置した」として、民事上の過失責任に加え、航空法に基づく行政処分の対象となりうる。
第6回で解説した剛体の力学では、機体フレームの変形と共振が生む空中分解リスクを扱った。しかし「剛体」として機体を捉えるだけでは不十分なケースがある。ペイロードが液体であれば「流動する質量」として、吊り下げ荷物であれば「振り子として揺れる質量」として、重心位置は飛行中に絶え間なく変化し続ける。
この「動く重心」を制御できなければ、ドローンは飛ばない。いや、正確に言えば——飛んでいる途中で制御を失う。それが最も危険な形態だ。
2. 重心(CG)の計算式——「バランスの科学」を実務に展開する
本稿で武器として装備する物理概念は、重心(Center of Gravity / Center of Mass) の位置計算とその動的評価である。
重心とは、物体の質量分布全体を「一点」に集約したとき、その点が存在する位置のことだ。重力はこの一点に集中して作用するものとして扱うことができ、すべての姿勢制御の計算はこの点を基準に行われる。
重心位置の基本公式は以下の通りである。
$$\vec{r}_{CG} = \frac{\sum_{_{i=1}}^{n} m_i \vec{r}_i}{\sum_{_{i=1}}^{n} m_i} = \frac{m_1 \vec{r}_1 + m_2 \vec{r}_2 + \cdots + m_n \vec{r}_n}{m_1 + m_2 + \cdots + m_n}$$各成分に分解すれば:
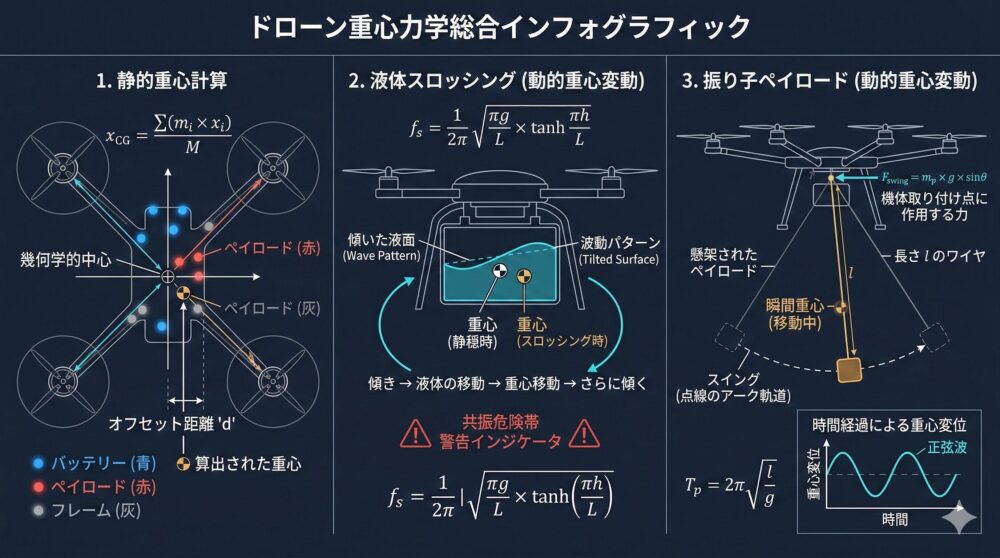
$$x_{CG} = \frac{\sum m_i x_i}{M}, \quad y_{CG} = \frac{\sum m_i y_i}{M}, \quad z_{CG} = \frac{\sum m_i z_i}{M}$$
ここで:
- $m_i$:各構成部品(フレーム、バッテリー、モーター、ペイロード等)の質量 [kg]
- $\vec{r}_i = (x_i, y_i, z_i)$:各構成部品の位置ベクトル [m]
- $M = \sum m_i$:総質量 [kg]
この公式を「学問」として眺めるのではなく、「飛行中にペイロードが変化したとき、重心がどこに移動し、その結果として各モーターに要求される推力差がどれだけ増大するかを算出するツール」として使いこなすこと——それが本稿の目的だ。
重心のズレは、第2回で学んだトルクに直結する。重心が機体の幾何学的中心からオフセットすれば、重力が生むモーメント($\tau = m g \times d$、ここで $d$ はオフセット距離)をフライトコントローラーが常時補正し続けなければならなくなる。その補正能力の限界を超えた瞬間、機体は姿勢を失い、墜落する。
3. 【メカニズムの厳密な解説】重心はなぜ動き、それがなぜ致命的なのか
3-1. 重心の定義——「質量の加重平均位置」という直感的理解
重心を初めて学ぶ方のために、日常的な例から入ろう。
長さ1メートルの棒の上に、左端に1kgの重り、右端に3kgの重りを置いたとする。この棒をどこで支えれば水平に釣り合うだろうか?
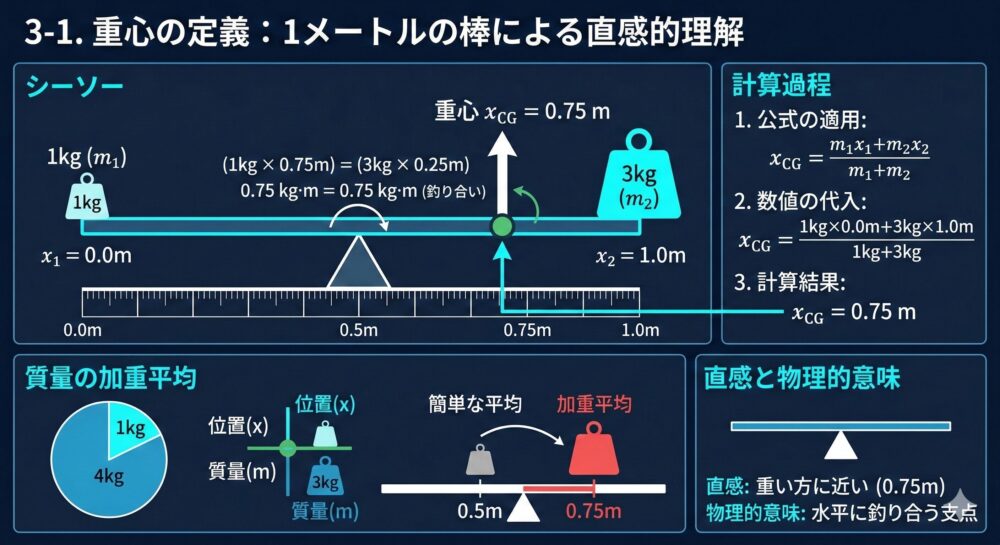
直感的には「重い方に近い位置」だと感じるだろう。実際にその通りだ。重心の公式を適用すると:
$$x_{CG} = \frac{m_1 x_1 + m_2 x_2}{m_1 + m_2} = \frac{1 \times 0 + 3 \times 1.0}{1 + 3} = \frac{3.0}{4} = 0.75 \text{ [m]}$$
左端から 0.75 m の位置、つまり右端(重い側)に寄った 3:1 の分割点が重心だ。この位置で棒を支えれば、完全に水平に釣り合う。
重心の本質は「質量の加重平均」 である。多くの部品が複雑に配置されたドローンであっても、この原理は完全に同一だ。各部品の質量と位置を網羅的にリストアップし、この公式に代入すれば、三次元空間における重心位置が一意に決定される。
3-2. ドローンにおける重心——なぜ「ローター中心」と一致すべきなのか
マルチコプター型ドローンの設計思想を理解するために、極めて重要な原則がある。
理想的なホバリング状態では、機体の重心はすべてのローターが生む合成推力の作用点と一致しなければならない。
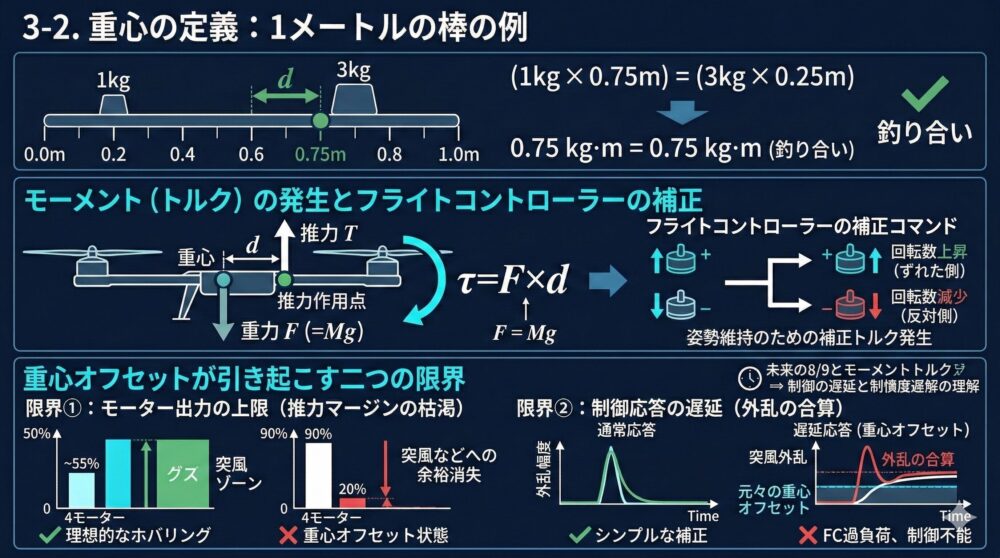
なぜか。もし重心が合成推力の作用点からずれていれば、重力と推力の間にモーメント(回転力)が生じる。第2回で学んだトルクの式を思い出してほしい:
$$\tau = F \times d$$
ここで $F$ は重力($= Mg$)、$d$ は重心と推力作用点のオフセット距離だ。このトルク $\tau$ が常に発生し続けると、フライトコントローラーは一部のモーターの回転数を上げ、反対側を下げることで対抗する。しかしこの補正には二つの限界がある:
限界①:モーター出力の上限(推力マージンの枯渇)
ホバリング状態では各モーターは最大推力の50〜60%程度で動作するのが一般的だ。重心がずれると、ずれた側のモーターはより高い推力を要求される。オフセットが大きくなるほど、モーターは最大出力に近づき、突風への対応に使える余裕(推力マージン)が消失する。
限界②:制御応答の遅延(第8回・第9回との接続)
重心がずれた機体では、フライトコントローラーが常に「傾き補正」のためにリソースを消費している。この状態で突風が入ると、補正すべき外乱が「元々のCGオフセット+突風」の合算となり、制御が追いつかなくなる。第8回で解説する慣性モーメントの概念が、この限界を定量的に明らかにする。
3-3. 「液揺れ」のメカニズム——スロッシング(Sloshing)問題
農薬散布ドローンや消火活動ドローンが搭載する液体タンクでは、スロッシング(液揺れ / Sloshing) と呼ばれる現象が発生する。これは流体力学的な振動現象であり、ロケット工学や船舶工学でも長年研究されてきた重大な課題だ。
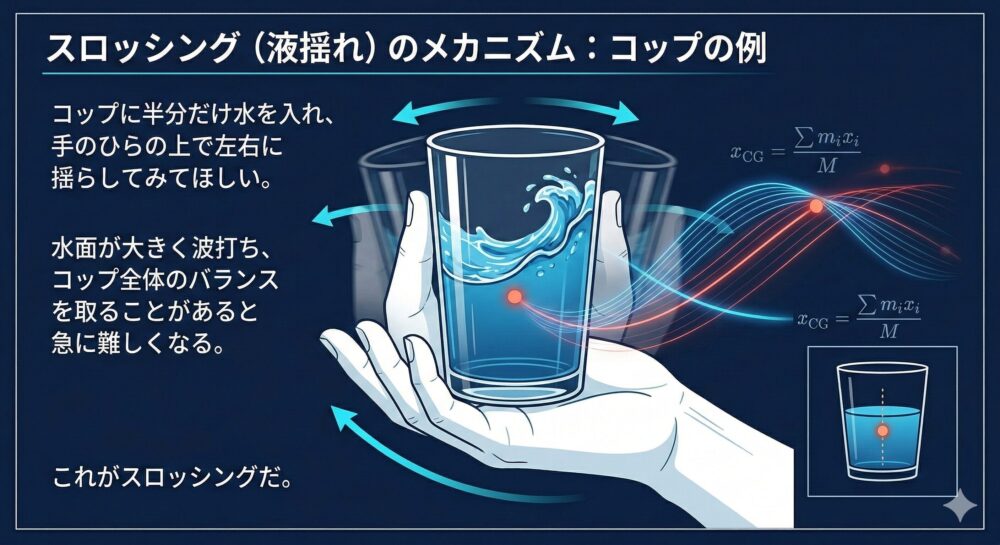
スロッシングのメカニズムを直感的に説明しよう。コップに半分だけ水を入れ、手のひらの上で左右に揺らしてみてほしい。水面が大きく波打ち、コップ全体のバランスを取ることが急に難しくなる。これがスロッシングだ。
ドローンのタンクで起きていることも本質的に同じだ。機体が風やフライトコントローラーの補正によってわずかに傾くと、タンク内の液体が傾いた方向に流れる。これにより重心がさらに傾いた方向にシフトし、フライトコントローラーは追加の補正を行う。するとその補正動作が今度は逆方向への液体移動を引き起こし——フィードバックループ(自励振動) が発生する。
物理的に定式化すると、タンク内液体のスロッシングの固有振動数 $f_s$ は、矩形タンクの場合、以下のように近似される:
$$f_s = \frac{1}{2\pi}\sqrt{\frac{\pi g}{L} \tanh\left(\frac{\pi h}{L}\right)}$$
- $g$:重力加速度(9.81 m/s²)
- $L$:タンクの液体移動方向の内寸(幅)[m]
- $h$:液面高さ [m]
この固有振動数が機体のロール/ピッチ制御の応答周波数と近接した場合、共振が起きる。共振については第28回で詳述するが、ここで重要なのは「タンクの形状と液面高さによって、危険な振動周波数が決まる」という事実だ。
さらに、散布によってタンク内の液量が減少すると:
- 液面高さ $h$ が下がることで固有振動数 $f_s$ が変化する
- 液面が低いほど自由液面の運動が激しくなり、重心移動量が増大する
- タンクが半分程度になったとき、スロッシングの影響が最大化する
これが「散布開始直後は安定していたのに、タンクが半分になったあたりで機体が暴れ始めた」という事故報告の物理的な正体だ。
3-4. 「荷揺れ」のメカニズム——吊り下げペイロードの振り子問題
物流ドローンで荷物をワイヤーやフックで吊り下げる場合、荷物は振り子として振動する。振り子の固有周期 $T_p$ は:
$$T_p = 2\pi\sqrt{\frac{l}{g}}$$
- $l$:吊り下げ長さ(ピボット点から荷物の重心まで)[m]
- $g$:重力加速度 [m/s²]
例えば、吊り下げ長さが 1.0 m の場合:
$$T_p = 2\pi\sqrt{\frac{1.0}{9.81}} \approx 2\pi \times 0.319 \approx 2.01 \text{ [s]}$$
約2秒周期で荷物が揺れる。この揺れは、荷物の質量を $m_p$ とすると、最大で以下の水平力を機体に及ぼす:
$$F_{swing} = m_p \times g \times \sin\theta_{max}$$
ここで $\theta_{max}$ は振り子の最大振幅角度だ。角度が小さい($\theta < 15°$ 程度)場合、$\sin\theta \approx \theta$(ラジアン)と近似でき、第1回で学んだラジアンの概念がここで再び活きてくる。
吊り下げペイロードが振れるということは、重心が機体の下方で周期的に水平移動していることと等価だ。この水平移動の振幅と周期は、フライトコントローラーにとって「低周波の外乱トルク」として作用する。
4. 【実務計算】審査官に提出する「重心管理評価書」の作り方
ケーススタディA:農薬散布ドローンのスロッシング影響評価
以下の機体で、農薬散布中のスロッシングが重心に与える影響を定量的に算出する。
【機体スペック】
| 項目 | 値 |
|---|---|
| 機体フレーム質量 | 8.0 kg |
| バッテリー質量 | 3.5 kg |
| モーター+プロペラ(×6) | 3.0 kg(合計) |
| 農薬タンク(空) | 1.0 kg |
| 農薬(満タン時) | 10.0 kg |
| 全備重量(満タン時) | 25.5 kg |
| 全備重量(空タンク時) | 15.5 kg |
| タンク内寸(幅 L × 奥行 × 高さ) | 0.30 m × 0.25 m × 0.15 m |
| タンク搭載位置(機体中心からの X 方向オフセット) | 0 m(中心搭載) |
| タンク搭載位置(機体中心からの Z 方向:下方) | -0.10 m |
STEP 1:静的重心位置の計算(満タン時)
まず、機体の座標系を定義する。原点を機体フレームの幾何学的中心に置き、X 軸を前方、Y 軸を右方、Z 軸を下方とする(NED:North-East-Down 座標系に準拠)。
各構成要素の質量と位置を表にまとめる。
| 構成要素 | 質量 $m_i$ [kg] | $x_i$ [m] | $y_i$ [m] | $z_i$ [m] |
|---|---|---|---|---|
| フレーム | 8.0 | 0 | 0 | 0 |
| バッテリー | 3.5 | 0.02 | 0 | 0.03 |
| モーター群(6基の平均) | 3.0 | 0 | 0 | -0.02 |
| タンク(空) | 1.0 | 0 | 0 | -0.10 |
| 農薬(満タン) | 10.0 | 0 | 0 | -0.10 |
| 合計 M | 25.5 |
各軸の重心位置を計算する。
$$x_{CG} = \frac{8.0 \times 0 + 3.5 \times 0.02 + 3.0 \times 0 + 1.0 \times 0 + 10.0 \times 0}{25.5}$$
$$x_{CG} = \frac{0.07}{25.5} \approx 0.003 \text{ [m]}$$
$$z_{CG} = \frac{8.0 \times 0 + 3.5 \times 0.03 + 3.0 \times (-0.02) + 1.0 \times (-0.10) + 10.0 \times (-0.10)}{25.5}$$
$$z_{CG} = \frac{0 + 0.105 – 0.06 – 0.10 – 1.00}{25.5} = \frac{-1.055}{25.5} \approx -0.041 \text{ [m]}$$
満タン時の重心位置は、幾何学的中心からX方向に約 3 mm 前方、Z方向に約 41 mm 下方にある。Y方向はタンクが中心搭載のため 0 mm だ。この結果は、概ね良好な設計であることを示している。
STEP 2:スロッシング時の最大重心移動量を算出する
タンクが 半分(5.0 kg / 液面高さ h = 0.075 m) の状態で、液体がタンクの片側に最大限偏ったとする。最悪条件として、液体がすべて幅方向(Y方向)の片側に集中した場合を想定する。
液体の重心のY方向最大移動量 $\Delta y_{liquid}$ は、矩形タンクにおける液体偏りの幾何学的限界として概ね以下で近似される:
$$\Delta y_{liquid} \approx \frac{L}{4} = \frac{0.30}{4} = 0.075 \text{ [m]}$$
これは「液面が片側に大きく傾いた場合、液体の重心がタンク中心から約 7.5 cm ずれる」ことを意味する。
このとき、機体全体の重心のY方向移動量 $\Delta y_{CG}$ は:
$$\Delta y_{CG} = \frac{m_{liquid} \times \Delta y_{liquid}}{M_{total}}$$
タンク半分の状態での全備重量は $M = 25.5 – 5.0 = 20.5$ kg であるから:
$$\Delta y_{CG} = \frac{5.0 \times 0.075}{20.5} \approx 0.018 \text{ [m]} = 18 \text{ [mm]}$$
機体全体の重心がY方向に最大 18 mm 移動する。
STEP 3:重心ズレが生むトルクを計算する
重心が 18 mm ずれた場合に重力が生むロール方向のトルク $\tau_{CG}$ は:
$$\tau_{CG} = M \times g \times \Delta y_{CG} = 20.5 \times 9.81 \times 0.018$$
$$\tau_{CG} \approx 3.62 \text{ [N·m]}$$
STEP 4:このトルクを補正するために必要な推力差を算出する
ヘキサコプター(6基)の対向するモーター間距離(モーターアーム長)を $L_{arm} = 0.50$ m とする。ロール方向の補正は、片側3基と反対側3基の推力差で行うため、有効レバーアームは概ね $L_{arm}$ に相当する。
必要な片側推力増加量 $\Delta T$ は:
$$\Delta T = \frac{\tau_{CG}}{L_{arm}} = \frac{3.62}{0.50} = 7.24 \text{ [N]}$$
各モーターのホバリング時推力は:
$$T_{hover/motor} = \frac{M \times g}{6} = \frac{20.5 \times 9.81}{6} \approx 33.5 \text{ [N]}$$
したがって、スロッシングによる推力補正の割合は:
$$\frac{\Delta T}{T_{hover/motor}} = \frac{7.24}{33.5} \approx 21.6%$$
ホバリング推力の約 22% が、液揺れ補正のために消費される。
これは極めて大きな値だ。一般に、突風対応のための推力マージンは最低でも 30〜40% は確保すべきとされる。液揺れだけで 22% が食い潰されれば、残りのマージンはわずか 8〜18% となり、風速 5 m/s 程度の突風で推力上限に達する可能性がある。
STEP 5:スロッシングの固有振動数を確認する
半分充填時の固有振動数 $f_s$ を計算する。
$$f_s = \frac{1}{2\pi}\sqrt{\frac{\pi g}{L} \tanh\left(\frac{\pi h}{L}\right)}$$
$$f_s = \frac{1}{2\pi}\sqrt{\frac{\pi \times 9.81}{0.30} \times \tanh\left(\frac{\pi \times 0.075}{0.30}\right)}$$
$$= \frac{1}{2\pi}\sqrt{\frac{30.82}{0.30} \times \tanh(0.785)}$$
$$= \frac{1}{2\pi}\sqrt{102.7 \times 0.656}$$
$$= \frac{1}{2\pi}\sqrt{67.4}$$
$$= \frac{1}{2\pi} \times 8.21 \approx 1.31 \text{ [Hz]}$$
周期に換算すると $T_s = 1 / 1.31 \approx 0.76$ 秒。
一般的な産業用ドローンのロール/ピッチ制御帯域は 2〜5 Hz 程度であるため、この 1.31 Hz は制御帯域の下限に近い。フライトコントローラーのPIDゲイン設定によっては、制御応答がスロッシングと干渉し、振動が増幅される危険性がある。
ケーススタディB:物流ドローンの吊り下げペイロード評価
【機体スペック】
| 項目 | 値 |
|---|---|
| 機体重量(ペイロード除く) | 12.0 kg |
| 吊り下げ荷物質量 | 5.0 kg |
| 吊り下げワイヤー長 | 1.5 m |
| 全備重量 $M$ | 17.0 kg |
STEP 1:振り子の固有周期を計算する
$$T_p = 2\pi\sqrt{\frac{l}{g}} = 2\pi\sqrt{\frac{1.5}{9.81}} = 2\pi \times 0.391 \approx 2.46 \text{ [s]}$$
荷物は約 2.5 秒周期で揺れる。
STEP 2:荷物が最大振幅で振れたときの重心移動量を算出する
荷物が角度 $\theta_{max} = 10°$(0.175 rad)まで振れたとすると、荷物の水平方向変位は:
$$\Delta x_{payload} = l \times \sin\theta_{max} = 1.5 \times \sin(10°) = 1.5 \times 0.174 = 0.261 \text{ [m]}$$
機体全体の重心移動量は:
$$\Delta x_{CG} = \frac{m_p \times \Delta x_{payload}}{M} = \frac{5.0 \times 0.261}{17.0} \approx 0.077 \text{ [m]} = 77 \text{ [mm]}$$
重心が水平方向に 77 mm も動く。 これはケーススタディA(農薬散布のスロッシング、18 mm)の4倍以上であり、吊り下げペイロードの問題の深刻さが一目瞭然だ。
STEP 3:重心移動が生むトルクと推力補正
$$\tau_{CG} = M \times g \times \Delta x_{CG} = 17.0 \times 9.81 \times 0.077 \approx 12.84 \text{ [N·m]}$$
仮にクアッドコプター(モーターアーム長 0.40 m)であれば:
$$\Delta T = \frac{12.84}{0.40} = 32.1 \text{ [N]}$$
各モーターのホバリング推力は:
$$T_{hover/motor} = \frac{17.0 \times 9.81}{4} \approx 41.7 \text{ [N]}$$
$$\frac{\Delta T}{T_{hover/motor}} = \frac{32.1}{41.7} \approx 77.0%$$
推力マージンの 77% が荷揺れ補正に消費される。
この数値は、事実上「制御不能寸前」であることを意味する。わずかな突風や追加の外乱で、モーターの推力上限に到達し、姿勢回復が不可能となる。これが、吊り下げ方式の物流ドローンが10°程度のわずかな荷振れでも墜落する物理的根拠だ。
安全マージンの設定と申請書への実装
上記二つのケーススタディの結果を、安全評価書の形式でまとめる。
【農薬散布ドローン:スロッシング影響評価】
| 評価項目 | 算出値 | 安全判定 |
|---|---|---|
| 最大重心移動量(Y方向) | 18 mm | 許容範囲内(モーターアーム長の3.6%) |
| 重心ズレによるトルク | 3.62 N·m | フライトコントローラー補正範囲内 |
| 推力マージン消費率 | 21.6% | 要注意:残マージン18%以下で風速制限を厳格化 |
| スロッシング固有振動数 | 1.31 Hz | 制御帯域下限に近い——PIDゲイン調整必須 |
| 運用制限の提案 | 風速 5 m/s 以下で運用、バッフル板の設置を推奨 |
【物流ドローン:吊り下げペイロード影響評価】
| 評価項目 | 算出値 | 安全判定 |
|---|---|---|
| 最大重心移動量(X方向) | 77 mm | 危険域(モーターアーム長の19.3%) |
| 重心ズレによるトルク | 12.84 N·m | フライトコントローラー補正限界に近い |
| 推力マージン消費率 | 77.0% | 制御不能リスク極めて高い |
| 振り子固有周期 | 2.46 s | 制御帯域外(低周波外乱として作用) |
| 運用制限の提案 | ワイヤー長を 0.5 m 以下に短縮、振動ダンパーの設置、飛行速度制限(3 m/s 以下)を適用 |
実務上の対策技術
上記の計算結果から導かれる具体的な対策を三つ提示する。
対策①:バッフル板(仕切板)の設置——スロッシング抑制
タンク内部に仕切板(バッフル)を設置することで、自由液面の移動距離 $L$ を縮小できる。例えばタンク幅を3分割するバッフルを入れれば、有効幅は $L/3 = 0.10$ m となり、スロッシングの固有振動数は約 2.27 Hz まで上昇し、制御帯域との干渉リスクが大幅に低減する。また、重心移動量も約 1/3 に圧縮される。
対策②:吊り下げ長の最小化——振り子周期の短縮
振り子周期 $T_p = 2\pi\sqrt{l/g}$ から明らかなように、吊り下げ長 $l$ を短くすれば周期は短くなる。$l = 0.3$ m にすれば $T_p \approx 1.10$ 秒となり、さらに振幅角度自体もワイヤーの短縮により制限される。理想的には、ペイロードを機体フレームに剛結合することで振り子問題を根本的に排除するのが最善だ。
対策③:アクティブCG補正システムの採用——先進的アプローチ
一部の先進的な産業用ドローンでは、バッテリーの搭載位置をスライドさせる機構や、カウンターウェイトを動的に移動させることで重心位置をリアルタイムに補正するシステムが研究されている。これは第9回で解説する「慣性モーメント応用編:ペイロード配置の最適解」へと繋がるテーマだ。
本稿で確立した重心計算のフレームワークは、第8回「慣性モーメント(基礎編)」で機体サイズと制御遅延の関係を定量化する際の、直接的な前提知識となる。重心の位置が慣性モーメントの計算における回転軸の設定を決定し、慣性モーメントの大きさが制御応答性を決定する——この連鎖を理解することが、第1フェーズ全体の統合的な武装を完成させる鍵だ。

コメント