

1. 審査官の最初の壁——「そのモーター、本当に制御できていますか?」
飛行許可申請書を提出した翌日、航空局の担当者からこう問われたとする。
「御社の機体、カタログにはモーター回転数『8,000RPM』と書いてありますが、この数値が突風時にどう変化し、姿勢制御にどう影響するか、説明できますか?」
返答に詰まった瞬間、あなたの申請はすでに危うい。
実務の現場で頻繁に起きるこの「第一の壁」は、実は驚くほど初歩的な概念の欠如から生まれている。RPM(Revolutions Per Minute:毎分回転数)という数字を「モーターの速さの目安」程度にしか理解していない担当者は、審査官の問いに対して定性的な説明しかできない。「速いです」「十分な推力があります」——こうした言葉は、法的な安全証明として一切機能しない。
カテゴリーIII飛行やDID(人口集中地区)上空飛行の許可申請において、機体の制御能力の証明は最初の関門だ。そしてその証明の起点となるのが、回転運動を物理学の言語に翻訳する概念——ラジアンと角速度である。
この概念を知らずにモーターの挙動を論じることは、音楽理論を知らずにオーケストラを指揮するようなものだ。審査官を納得させる「計算書」は、ここから始まる。
2. 「RPMをラジアン/秒に変換する」——これだけで、あなたの申請書は別次元になる
ドローンのモーター回転数はメーカーカタログ上、RPMで表記される。しかしこの単位は、物理的な力学計算(トルク、角運動量、制御ゲインの設定)に直接使える形になっていない。
工学と物理学の世界では、回転運動を角速度 ω(オメガ)[rad/s:ラジアン毎秒]で表す。申請書の中でこの変換を明示し、そこからトルクや慣性モーメントの計算へと繋いでいく一連の流れを示すこと——それ自体が「この事業者は機体の挙動を物理的に把握している」という、審査官に対する強力なシグナルとなる。
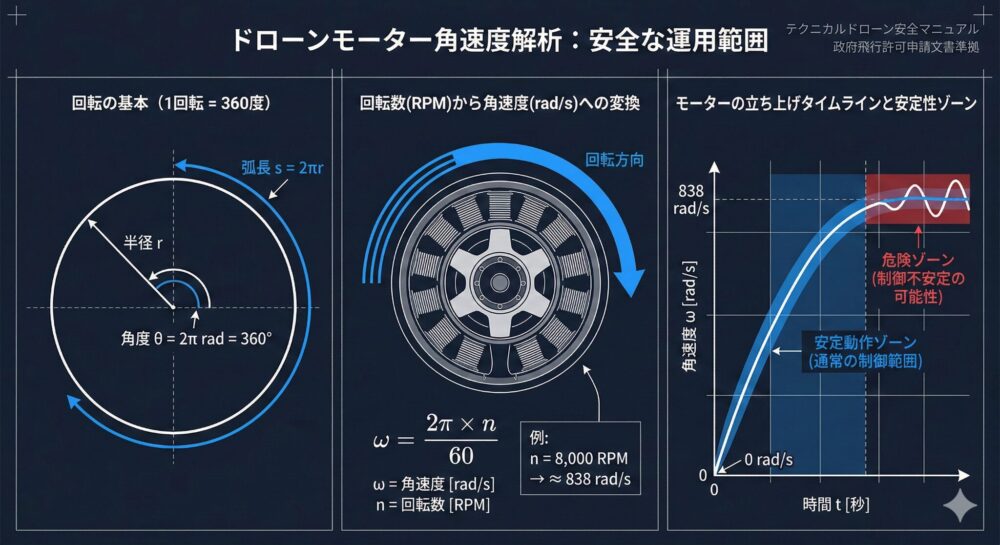
今回の武器:角速度 ω の定義と、RPMからの変換式
ここで n は毎分回転数 [RPM] である。
この一行の式が、あなたの申請書に「物理的根拠」という鎧を纏わせる。
3. 【メカニズムの解説】ラジアンとは何か、角速度とは何か——厳密かつ実務的に理解する
ラジアン(rad):「角度」を工学的に扱うための単位
日常生活では角度を「度(°)」で表す。しかし物理方程式の中に「360°」や「90°」という数字が混在すると、計算式の中で変換係数が必要になり、エラーの温床となる。
ラジアンとは、円の半径 r と弧の長さ s の比によって角度を定義する単位だ。
円一周(360°)を一周するとき、弧の長さは円周 2πr に等しい。したがって一周は 2π ラジアンとなる。

この定義により、ラジアンは「純粋な比(無次元量)」となり、物理方程式の中で他の単位と摩擦なく結合できる。トルクの計算も、角運動量の計算も、すべてラジアンを前提として成立している。
角速度 ω:「どれだけ速く回っているか」を力学の言語で表す
角速度 ω は、単位時間あたりに回転する角度の変化量である。
モーターの回転数 n [RPM] は「1分間に n 回転する」ことを意味する。1回転は 2π ラジアンであり、1分は60秒であるから、変換式は自然に導かれる。
この ω こそが、第2回以降で解説するトルク・慣性モーメント・角運動量の計算に直接入力される「基本変数」だ。第1回でこれを押さえることは、全60回シリーズの物理的な基盤を据えることに等しい。
4. 【実務計算】モーター回転数から「制御応答性の証明」へ——実際にシミュレーションする
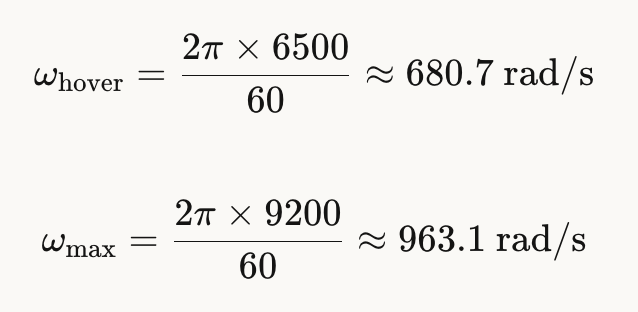
ステップ1:角速度 ω の算出
一般的なクワッドコプター型産業用ドローン(機体重量2.5kg、ペイロード1.0kg)に搭載されたモーターのカタログ値を仮定する。
- ホバリング時モーター回転数:n = 6,500 RPM
- 最大出力時モーター回転数:n = 9,200 RPM
それぞれの角速度を計算する。
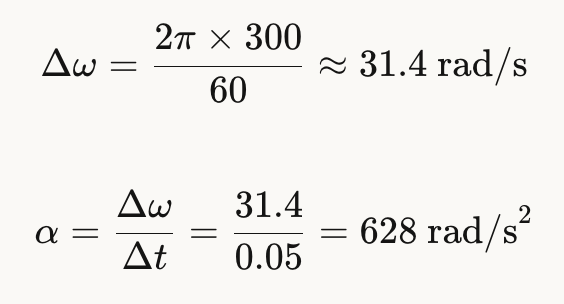
ステップ2:角速度の変化率(角加速度 α)から制御応答性を評価する
突風が機体に当たり、フライトコントローラーが姿勢補正のためにモーター回転数を Δ n = 300 RPM 増加させる指令を出したとする。この変化が Δ t = 0.05$ 秒で完了する場合、角加速度 α は次のように算出される。
ステップ3:この数値が申請書で意味すること
この α = 628 rad/s2 という角加速度は、「この機体が0.05秒以内に制御補正を完了できる」という物理的証拠となる。
第5回(ニュートンの運動方程式)と組み合わせることで、「秒速8メートルの突風に対し、機体は最大で横方向に何センチ流されるか」というシミュレーションへと発展する。審査官が恐れる「風に流されたらどうするのか」という問いへの定量的な回答は、この角速度の計算から端を発するのだ。
安全マージンの設定
実務上の申請書には、以下の形で記載することを推奨する。

安全係数(ここでは0.80〜0.85)は、モーターの経年劣化、気温による電気抵抗変化、バッテリー残量低下時の出力降下を包括的に織り込んだものであり、この根拠を別途メーカーデータシートと照合することで、申請書の法的信頼性は飛躍的に向上する。
第2回では、この ω を使って算出されるトルクτ = I・αへと進む。重量級ペイロードを持ち上げる物理的根拠の示し方——それが次なる「武器」となる。

コメント