

1. 「フレームは頑丈だから大丈夫」——その一言が、空中分解事故を招く
ある産業用ドローン事業者が、橋梁点検のためにカテゴリーIII飛行の許可申請を提出した。機体はカーボンファイバー製の6軸ヘキサコプター、全備重量18 kg。申請書の「機体の安全性」欄にはこう書かれていた。
「機体フレームにはカーボンファイバー(CFRP)を採用しており、十分な剛性を有しています。」
航空局の審査官は、この記述を見て静かにペンを置き、こう切り返した。
「カーボンファイバーが高剛性であることは承知しています。しかし、御社の機体フレームがモーターの回転振動によってどの程度たわみ、そのたわみの固有振動数がモーターの常用回転数と一致しないことを、どのように確認されていますか?」
——沈黙。
この質問の意味が理解できなかった時点で、その申請は事実上、終わっている。
ここで問われているのは、「共振(レゾナンス)」という物理現象である。すべての構造物には固有振動数(Natural Frequency)が存在し、外部からの振動がこの周波数と一致すると、構造物は想定をはるかに超える振幅で振動し、最終的に破壊に至る。歴史上最も有名な共振事故は、1940年のタコマ・ナローズ橋の崩落だ。風速わずか19 m/sの風が橋の固有振動数と共振し、巨大な吊り橋が文字通りちぎれた。
ドローンの機体フレームで同じことが起きないと、なぜ言い切れるのか?
4基あるいは6基のモーターが毎秒100回以上回転し、そのすべてがフレームに周期的な力を伝えている。モーターの回転数を変化させる(つまり、姿勢制御を行う)たびに、フレームは微小な「たわみ」を繰り返す。この微小なたわみが蓄積され、フレームの固有振動数と一致した瞬間——それは突然訪れる。フレームの接合部が疲労破壊を起こし、アームが折れ、機体は空中で分解する。
これは理論上のリスクではない。産業用ドローンの現場事故において、「フレームの振動疲労による構造破壊」は報告されている実際の事象だ。そして、この事象を「起きない」と証明するためには、剛体の力学を理解し、フレームの変形特性を定量的に示す必要がある。
「カーボンだから丈夫」——この言葉は、物理を知らない者の慰めに過ぎない。
2. 【武器の提示】剛体の力学——構造物の「硬さ」と「振動」を数値化する道具
本稿で取り扱うのは、剛体の力学(Rigid Body Mechanics)の基礎概念、およびそこから派生する構造力学的なたわみ解析と固有振動数の評価手法である。
まず「剛体」の定義を明確にしておく。
剛体(Rigid Body):外力が加わっても変形しない(形状が一切変わらない)理想的な物体。
物理学では、回転や並進の運動解析を簡潔に行うために、この「変形しない物体」というモデルを出発点とする。第4回(慣性の法則)や第5回($F = ma$)で扱った運動方程式は、すべてこの剛体モデルを前提としていた。
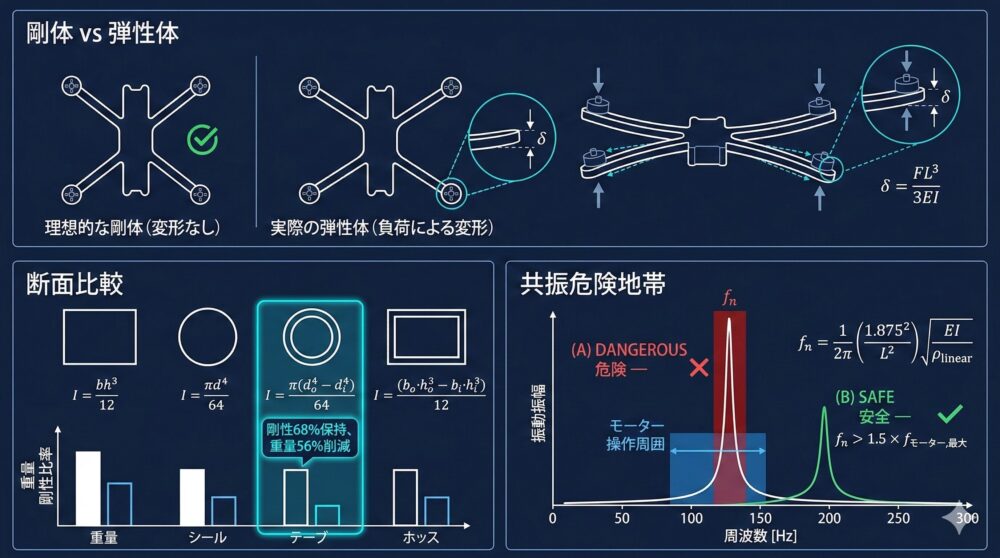
しかし、現実のドローンフレームは剛体ではない。どんなに硬い素材であっても、力が加われば必ずわずかに変形する。この「理想(剛体)と現実(弾性体)のギャップ」こそが、振動問題と構造破壊の根源だ。
本稿で武器として提示する概念と公式は、以下の三つである。
【武器①】ヤング率(弾性係数)$E$ ——素材の「硬さ」を示す絶対指標
$$\sigma = E \cdot \varepsilon$$
ここで $\sigma$(シグマ)は応力 [Pa]、$\varepsilon$(イプシロン)はひずみ [無次元] である。この式はフックの法則のマクロ版であり、「力をかけたとき、素材がどれだけ変形するか」を一意に決定する。
【武器②】断面二次モーメント $I$ ——構造体の「形状がもたらす曲げにくさ」
$$I = \frac{bh^3}{12} \quad \text{(矩形断面の場合)}$$
同じ素材でも、断面形状が変われば曲げに対する抵抗力は劇的に変化する。ドローンのアーム断面が円形か角型か、中空か中実か——この違いが、たわみ量を何倍も変える。
【武器③】固有振動数 $f_n$ ——フレームが「勝手に揺れたがる」周波数の特定
$$f_n = \frac{1}{2\pi}\sqrt{\frac{k}{m}}$$
ここで $k$ は構造体の剛性(バネ定数)[N/m]、$m$ は振動する部分の質量 [kg] である。この $f_n$ がモーターの回転周波数と一致しないことを示すことが、「空中分解しない」ことの物理的証明となる。
これら三つの武器を組み合わせることで、「このフレームは、使用するモーターの全回転数域において共振しないため、構造的に安全である」という、審査官が求める定量的証明を構築できる。
3. 【メカニズムの解説】剛体モデルから弾性体モデルへ——ドローンフレームの「本当の姿」
3-1. 剛体とは何か:物理学の理想モデル
剛体とは、先に定義した通り「どれだけ力を加えても変形しない物体」である。この理想化によって、物体の運動を「重心の並進運動」と「重心まわりの回転運動」の二つに分離して解析できる。
これまでのシリーズで扱ってきた概念——第1回の角速度 $\omega$、第2回のトルク $\tau$、第4回の慣性の法則、第5回の $F = ma$ ——はすべて、ドローン機体を「一つの剛体」として扱ったうえでの解析だった。ホバリング中の機体がトルクを受けて回転する計算、突風で押されて移動する計算は、「機体が変形しない」という前提の下で成立している。
この前提は、機体全体のマクロな運動を記述するうえでは十分に有効だ。だが、機体フレームの「構造的安全性」を評価するためには、剛体モデルだけでは不十分である。なぜなら、実際のフレームは力を受けたとき微小ながら確実に変形し、その変形の積み重ねが破壊を引き起こすからだ。
3-2. 弾性体としてのフレーム:ヤング率 $E$ の意味
現実のドローンフレームは弾性体(Elastic Body)としてモデル化する必要がある。弾性体とは、外力が加わると変形し、外力を除去すると元の形に戻る物体である(永久変形を起こさない範囲において)。
この「力と変形の関係」を支配するのが、ヤング率(Young’s Modulus)$E$ だ。
材料に引張力や圧縮力を加えたとき、応力(単位面積あたりの力)とひずみ(元の長さに対する変形量の比)の間には、弾性限界内で以下の線形関係が成り立つ。
$$\sigma = E \cdot \varepsilon$$
各記号の定義を明確にする。
- 応力 $\sigma$(シグマ)[Pa = N/m²]:部材の断面に作用する単位面積あたりの力。
$$\sigma = \frac{F}{A_{\text{cross}}}$$
ここで $F$ は作用する力 [N]、$A_{\text{cross}}$ は断面積 [m²]。
- ひずみ $\varepsilon$(イプシロン)[無次元]:元の長さに対する変形量の比。
$$\varepsilon = \frac{\Delta L}{L_0}$$
ここで $\Delta L$ は変形量 [m]、$L_0$ は元の長さ [m]。
- ヤング率 $E$ [Pa]:応力とひずみの比例定数。値が大きいほど「硬い」素材。
ドローンフレームに使用される代表的な素材のヤング率を示す。
| 素材 | ヤング率 $E$ [GPa] | 密度 $\rho_m$ [kg/m³] | 比剛性 $E/\rho_m$ [MPa·m³/kg] |
|---|---|---|---|
| アルミニウム合金(A7075) | 72 | 2,810 | 25.6 |
| カーボンファイバー(CFRP)一方向材 | 130〜180 | 1,550〜1,600 | 84〜113 |
| カーボンファイバー(CFRP)クロス材 | 60〜80 | 1,500〜1,550 | 40〜52 |
| チタン合金(Ti-6Al-4V) | 114 | 4,430 | 25.7 |
| エンジニアリングプラスチック(PA6-GF30) | 9〜11 | 1,350 | 6.7〜8.1 |
ここで注目すべきは比剛性(Specific Stiffness)$E/\rho_m$ である。これは「単位質量あたりの硬さ」を示す指標であり、軽量化が至上命題のドローンにおいてはヤング率の絶対値よりもこちらが設計上の決定的な判断基準となる。CFRP一方向材の比剛性はアルミの3〜4倍以上であり、これが産業用ドローンフレームにカーボンファイバーが選ばれる物理的根拠だ。
しかし——ここが申請上の盲点となるのだが——CFRPのヤング率は繊維方向に対して強い異方性(Anisotropy)を持つ。上記の表で一方向材とクロス材のヤング率に2倍以上の差がある理由はここにある。実際の機体フレームでは、力の方向に応じたCFRPの積層設計が行われているが、審査官が気にするのは「最も弱い方向(最小ヤング率の方向)でも安全か?」という点だ。
3-3. 断面二次モーメント $I$:「形」が決める曲げ剛性
素材が同じでも、部材の断面形状が変われば、曲げに対する抵抗力は劇的に変化する。これを定量的に記述するのが断面二次モーメント $I$(Second Moment of Area / Area Moment of Inertia)である。
注意:慣性モーメント(Mass Moment of Inertia)との混同に注意。 第8回・第9回で扱う慣性モーメントは「回転しにくさ」の指標(単位は kg·m²)であり、ここでの断面二次モーメントは「曲がりにくさ」の指標(単位は m⁴)である。名称が類似するが、物理的意味は全く異なる。
断面二次モーメント $I$ は、断面の各微小面積要素と中立軸からの距離の二乗の積分として定義される。
$$I = \int y^2 dA$$
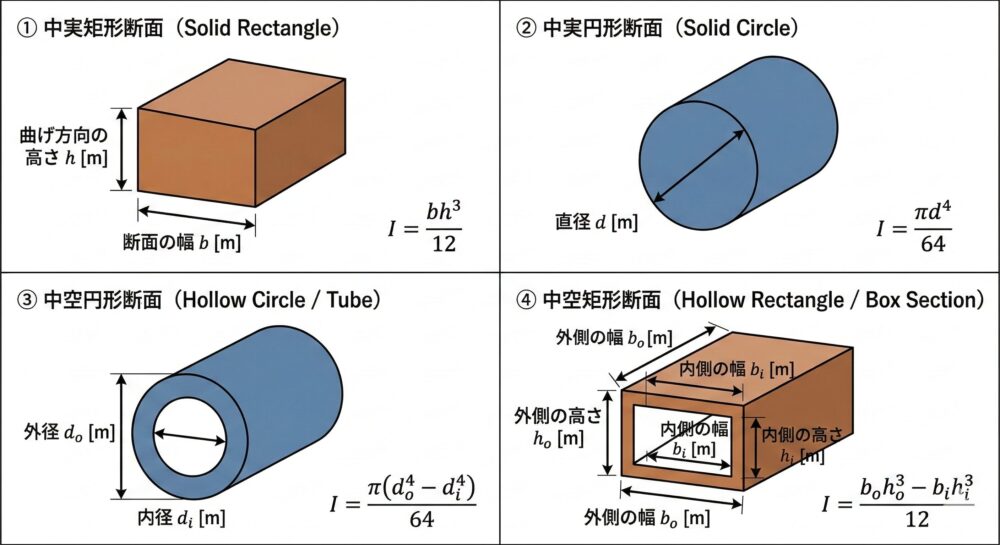
実務上よく使用される断面形状について、公式を示す。
① 中実矩形断面(Solid Rectangle)
$$I = \frac{bh^3}{12}$$
$b$:断面の幅 [m]、$h$:曲げ方向の高さ [m]
② 中実円形断面(Solid Circle)
$$I = \frac{\pi d^4}{64}$$
$d$:直径 [m]
③ 中空円形断面(Hollow Circle / Tube)
$$I = \frac{\pi (d_o^4 – d_i^4)}{64}$$
$d_o$:外径 [m]、$d_i$:内径 [m]
④ 中空矩形断面(Hollow Rectangle / Box Section)
$$I = \frac{b_o h_o^3 – b_i h_i^3}{12}$$
$b_o, h_o$:外側の幅と高さ、$b_i, h_i$:内側(中空部分)の幅と高さ
ドローンのアームは多くの場合、③の中空円形断面(カーボンパイプ)または④の中空矩形断面(角型カーボンチューブ)で構成される。中空断面が選ばれる理由は明快だ——断面の中心部の素材は曲げ剛性への寄与が極めて小さい($y^2$ の重み付けにより、中立軸に近い素材ほど貢献が少ない)ため、中心をくり抜いても剛性低下はわずかで、重量は大幅に削減できる。
具体的に比較してみよう。外径 $d_o = 16$ mm の中実カーボンパイプと、外径 $d_o = 16$ mm・内径 $d_i = 12$ mm の中空カーボンパイプの断面二次モーメントを計算する。
中実:
$$I_{\text{solid}} = \frac{\pi \times (0.016)^4}{64} = \frac{\pi \times 6.5536 \times 10^{-8}}{64} \approx 3.217 \times 10^{-9} \text{ m}^4$$
中空:
$$I_{\text{hollow}} = \frac{\pi \times \left((0.016)^4 – (0.012)^4\right)}{64} = \frac{\pi \times (6.5536 \times 10^{-8} – 2.0736 \times 10^{-8})}{64}$$ $$= \frac{\pi \times 4.4800 \times 10^{-8}}{64} \approx 2.198 \times 10^{-9} \text{ m}^4$$
断面二次モーメントの比:
$$\frac{I_{\text{hollow}}}{I_{\text{solid}}} = \frac{2.198}{3.217} \approx 0.683$$
つまり、中空にしても断面二次モーメント(曲げ剛性)は約68%を維持している。
一方、断面積の比を見てみよう。
$$A_{\text{solid}} = \frac{\pi \times (0.016)^2}{4} \approx 2.011 \times 10^{-4} \text{ m}^2$$
$$A_{\text{hollow}} = \frac{\pi \times ((0.016)^2 – (0.012)^2)}{4} = \frac{\pi \times (2.56 – 1.44) \times 10^{-4}}{4} \approx 8.796 \times 10^{-5} \text{ m}^2$$
$$\frac{A_{\text{hollow}}}{A_{\text{solid}}} = \frac{8.796}{20.11} \approx 0.437$$
重量は約44%に減少し(56%軽量化)、剛性は68%を維持——重量あたりの曲げ剛性が約1.56倍に向上している。これが中空パイプを採用する定量的根拠であり、この数値を申請書に記載することで、「なぜこの断面形状を選んだのか」という設計思想を物理的に説明できる。
3-4. たわみ量の計算:カンチレバー梁モデル
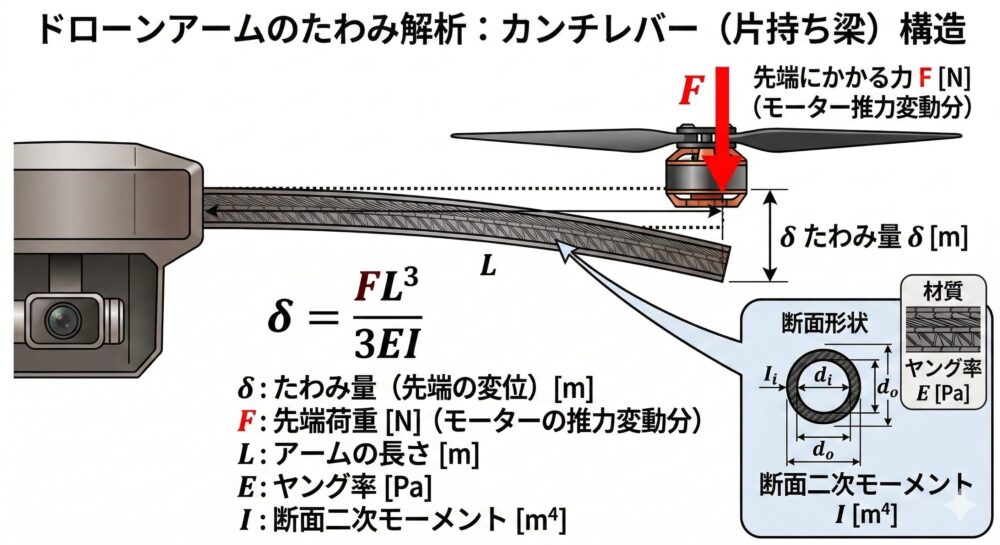
ドローンのアーム(モーターマウントアーム)は、中央ボディから片持ち梁(カンチレバー)として突き出している。この構造のたわみ量 $\delta$ は、材料力学の基本式から求められる。
アーム先端(モーター取り付け位置)に集中荷重 $F$ がかかる場合:
$$\delta = \frac{F L^3}{3 E I}$$
- $\delta$:たわみ量(先端の変位)[m]
- $F$:先端にかかる力 [N](モーターの推力変動分)
- $L$:アームの長さ [m]
- $E$:ヤング率 [Pa]
- $I$:断面二次モーメント [m⁴]
この $\delta$ が実際にどの程度の値になるかは、第4節の実務計算で具体的に示す。重要なのは、$\delta$ が「ゼロでない」という事実だ。どんなに硬い素材でも、力を受ければたわむ。そしてモーターは回転し続ける限り、周期的にこの力を加え続ける。この周期的なたわみの繰り返しが、共振という破壊的現象への入口となる。
3-5. 固有振動数 $f_n$:フレームが「自然に揺れる」周波数
すべての弾性構造体は、固有の振動数を持つ。これは「その構造体を一度だけ叩いて放置した場合に、自然に振動する周波数」であり、素材の剛性と質量によって一意に決定される。
片持ち梁の一次固有振動数 $f_n$ は、以下の式で近似される。
$$f_n = \frac{1}{2\pi} \times \frac{(1.875)^2}{L^2} \times \sqrt{\frac{E I}{\rho_{\text{linear}}}}$$
ここで:
- $L$:梁(アーム)の長さ [m]
- $E$:ヤング率 [Pa]
- $I$:断面二次モーメント [m⁴]
- $\rho_{\text{linear}}$:単位長さあたりの質量(線密度)[kg/m]
- $\rho_{\text{linear}} = \rho_m \times A_{\text{cross}}$($\rho_m$:素材密度、$A_{\text{cross}}$:断面積)
定数 1.875 は、片持ち梁の一次振動モードにおける境界条件から導かれる固有値であり、「一端固定・他端自由」の条件で $\cos(\beta L) \cosh(\beta L) = -1$ を解いた最小正根 $\beta_1 L \approx 1.875$ に由来する。
この固有振動数 $f_n$ が、モーターの回転周波数 $f_{\text{motor}}$ と一致しない(あるいは十分に離れている)ことを示すことが、構造安全性の証明の核心となる。
モーターの回転周波数は単純に:
$$f_{\text{motor}} = \frac{n}{60} \quad \text{[Hz]}$$
であり、例えば $n = 6{,}000$ RPM なら $f_{\text{motor}} = 100$ Hz、$n = 9{,}000$ RPM なら $f_{\text{motor}} = 150$ Hz となる。
共振条件:
$$f_n \approx f_{\text{motor}} \quad \text{のとき、フレームは破壊的振動を起こし得る}$$
実務上は、固有振動数がモーターの使用回転数域の1.5倍以上離れていることを安全マージンとして設定する。すなわち:
$$f_n > 1.5 \times f_{\text{motor, max}} \quad \text{または} \quad f_n < \frac{f_{\text{motor, min}}}{1.5}$$
この条件を満たしていることを申請書に記載し、計算過程を添付することで、「この機体は共振による構造破壊のリスクが排除されている」という物理的証明が完成する。
4. 【実務計算】モーターアームの共振リスクを排除する——審査官に提出できる「構造安全性評価書」
ケーススタディ:全備重量12 kgヘキサコプターのアーム構造評価
以下の現実的な機体仕様を使い、フレームアームの固有振動数を算出し、モーターの使用回転数域と共振しないことを定量的に証明する。
【機体スペック】
| 項目 | 値 |
|---|---|
| 機体構成 | 6軸ヘキサコプター |
| 全備重量(機体+バッテリー+ペイロード) | 12.0 kg |
| モーター1基あたりの最大推力 | 35 N(推力余裕率:$35 \times 6 / (12 \times 9.81) \approx 1.78$) |
| モーター回転数域 | ホバリング:5,500 RPM / 最大:8,500 RPM |
| アーム構造 | CFRP中空円形パイプ |
| アーム外径 $d_o$ | 20 mm(0.020 m) |
| アーム内径 $d_i$ | 16 mm(0.016 m) |
| アーム長 $L$(中央ハブ端面からモーターマウント中心) | 0.30 m |
| CFRP ヤング率 $E$ | 70 GPa = $70 \times 10^9$ Pa(クロス材、保守的評価値) |
| CFRP 密度 $\rho_m$ | 1,550 kg/m³ |
STEP 1:断面二次モーメント $I$ の算出
中空円形断面の公式を適用する。
$$I = \frac{\pi (d_o^4 – d_i^4)}{64}$$
$$I = \frac{\pi \times \left((0.020)^4 – (0.016)^4\right)}{64}$$
各項を計算する。
$$(0.020)^4 = 1.6000 \times 10^{-7} \text{ m}^4$$ $$(0.016)^4 = 6.5536 \times 10^{-8} \text{ m}^4$$
$$d_o^4 – d_i^4 = 1.6000 \times 10^{-7} – 6.5536 \times 10^{-8} = 9.4464 \times 10^{-8} \text{ m}^4$$
$$I = \frac{\pi \times 9.4464 \times 10^{-8}}{64} = \frac{2.9677 \times 10^{-7}}{64} \approx 4.637 \times 10^{-9} \text{ m}^4$$
STEP 2:断面積と線密度の算出
アームの断面積 $A_{\text{cross}}$:
$$A_{\text{cross}} = \frac{\pi (d_o^2 – d_i^2)}{4} = \frac{\pi \times ((0.020)^2 – (0.016)^2)}{4}$$
$$= \frac{\pi \times (4.000 \times 10^{-4} – 2.560 \times 10^{-4})}{4} = \frac{\pi \times 1.440 \times 10^{-4}}{4}$$
$$\approx 1.131 \times 10^{-4} \text{ m}^2$$
単位長さあたりの質量(線密度)$\rho_{\text{linear}}$:
$$\rho_{\text{linear}} = \rho_m \times A_{\text{cross}} = 1{,}550 \times 1.131 \times 10^{-4} \approx 0.1753 \text{ kg/m}$$
STEP 3:アームの一次固有振動数 $f_n$ の算出
片持ち梁の一次固有振動数の公式を適用する。
$$f_n = \frac{1}{2\pi} \times \frac{(1.875)^2}{L^2} \times \sqrt{\frac{E I}{\rho_{\text{linear}}}}$$
各項を順に計算する。
(1) $(1.875)^2 = 3.5156$
(2) $L^2 = (0.30)^2 = 0.09$ m²
(3) $\frac{(1.875)^2}{L^2} = \frac{3.5156}{0.09} = 39.062$
(4) 曲げ剛性 $EI$:
$$EI = 70 \times 10^9 \times 4.637 \times 10^{-9} = 324.6 \text{ N·m}^2$$
(5) $\frac{EI}{\rho_{\text{linear}}}$:
$$\frac{324.6}{0.1753} = 1{,}851.7 \text{ m}^4/\text{s}^2$$
(6) $\sqrt{\frac{EI}{\rho_{\text{linear}}}}$:
$$\sqrt{1{,}851.7} \approx 43.03 \text{ m}^2/\text{s}$$
(7) 最終計算:
$$f_n = \frac{1}{2\pi} \times 39.062 \times 43.03$$
$$= \frac{1}{6.2832} \times 1{,}681.0$$
$$\approx 267.5 \text{ Hz}$$
アームの一次固有振動数は、約 267.5 Hz と算出された。
STEP 4:モーター回転周波数との比較——共振判定
モーターの回転周波数を算出する。
$$f_{\text{hover}} = \frac{5{,}500}{60} \approx 91.7 \text{ Hz}$$
$$f_{\text{max}} = \frac{8{,}500}{60} \approx 141.7 \text{ Hz}$$
共振回避条件の検証:
$$f_n > 1.5 \times f_{\text{motor, max}}$$
$$267.5 > 1.5 \times 141.7 = 212.6 \quad \checkmark \text{ 条件を満足}$$
安全マージン(周波数比):
$$\text{周波数比} = \frac{f_n}{f_{\text{motor, max}}} = \frac{267.5}{141.7} \approx 1.89$$
この値は、共振回避の目安である 1.5 を十分に上回っており、フレームアームが通常運用のモーター回転数域で共振する可能性は極めて低いことが定量的に証明された。
STEP 5:モーター先端でのたわみ量の確認
さらに、飛行中にアーム先端が実際にどの程度たわむかを確認しておく。ホバリング時、各モーターは機体重量を均等に支えているため、1基あたりの推力は:
$$T_{\text{hover, per motor}} = \frac{12.0 \times 9.81}{6} \approx 19.62 \text{ N}$$
この推力がアーム先端に上向きにかかる(正確には、アーム先端のモーターマウントを介して反力がフレームに伝わる)。
姿勢制御時に推力を急激に変化させた場合の変動荷重を考える。例えば、突風への対応でモーター出力を瞬間的に50%増加させた場合の変動力は:
$$\Delta F = 19.62 \times 0.5 = 9.81 \text{ N}$$
このときのアーム先端のたわみ量 $\delta$ は:
$$\delta = \frac{\Delta F \times L^3}{3 E I}$$
$$= \frac{9.81 \times (0.30)^3}{3 \times 70 \times 10^9 \times 4.637 \times 10^{-9}}$$
$$= \frac{9.81 \times 0.027}{3 \times 324.6}$$
$$= \frac{0.2649}{973.8}$$
$$\approx 2.72 \times 10^{-4} \text{ m} = 0.272 \text{ mm}$$
アーム先端のたわみは約0.27 mm である。300 mmのアーム長に対してわずか0.09%のたわみであり、構造的には問題のないレベルだ。しかし、この「微小なたわみ」が毎秒100回以上繰り返されることが問題の本質であり、だからこそ固有振動数の評価が必要不可欠なのだ。
STEP 6(補足):モーター先端の付加質量を考慮した補正
ここまでの計算はアーム単体(分布質量モデル)の固有振動数であるが、実際にはアーム先端にモーターとプロペラの質量(集中質量)が付加されている。この効果を考慮すると、固有振動数は低下する。
先端集中質量 $m_{\text{tip}}$ を考慮した補正式は以下の通りだ。
$$f_{n,\text{corrected}} = \frac{1}{2\pi}\sqrt{\frac{3EI}{(m_{\text{tip}} + 0.2357 \cdot m_{\text{arm}}) \cdot L^3}}$$
ここで $m_{\text{arm}}$ はアーム自体の質量、$0.2357$ は片持ち梁の等価質量係数(一次モードにおいて分布質量を先端集中質量に換算する係数)である。
各値を代入する。
- $m_{\text{arm}} = \rho_{\text{linear}} \times L = 0.1753 \times 0.30 = 0.0526$ kg
- $m_{\text{tip}} = 0.120$ kg(モーター85 g + プロペラ20 g + マウント金具15 g と仮定)
$$f_{n,\text{corrected}} = \frac{1}{2\pi}\sqrt{\frac{3 \times 324.6}{(0.120 + 0.2357 \times 0.0526) \times (0.30)^3}}$$
$$= \frac{1}{2\pi}\sqrt{\frac{973.8}{(0.120 + 0.01240) \times 0.027}}$$
$$= \frac{1}{2\pi}\sqrt{\frac{973.8}{0.1324 \times 0.027}}$$
$$= \frac{1}{2\pi}\sqrt{\frac{973.8}{3.575 \times 10^{-3}}}$$
$$= \frac{1}{2\pi}\sqrt{272{,}391}$$
$$= \frac{1}{2\pi} \times 521.9$$
$$\approx 83.1 \text{ Hz}$$
先端質量を考慮した補正後の固有振動数は、約 83.1 Hz となった。
ここで再び共振判定を行う。
$$f_{n,\text{corrected}} = 83.1 \text{ Hz}$$ $$f_{\text{hover}} = 91.7 \text{ Hz}$$
周波数比:
$$\frac{f_{n,\text{corrected}}}{f_{\text{hover}}} = \frac{83.1}{91.7} \approx 0.906$$
——これは極めて危険な状態だ。
補正前の計算では267.5 Hzで「安全」と判定されたが、モーター・プロペラの質量を考慮すると固有振動数は83.1 Hzまで大幅に低下し、ホバリング時のモーター回転周波数91.7 Hzに危険なほど接近している。周波数比0.906は、共振回避基準の1.5どころか1.0を下回っており、ホバリング回転数近傍で共振が発生する可能性がある。
これがまさに、「カーボンだから丈夫」という定性的評価が見落とす致命的なリスクだ。アーム単体の剛性は十分でも、先端の付加質量によって系全体の振動特性は根本的に変化する。
対策の方向性
この結果を受けた設計上の対策は、以下の三方向である。
対策①:アーム剛性の向上( $EI$ の増大) アーム外径を 20 mm → 25 mm に拡大する、あるいは肉厚を増す。$I$ は直径の4乗に比例するため、わずかな径の増加で大きな効果が得られる。例えば外径25 mm・内径20 mmとした場合、$I$ は約3.6倍に増大し、固有振動数は約1.9倍(約158 Hz)まで上昇する。
対策②:先端質量の削減($m_{\text{tip}}$ の低減) より軽量なモーターの選定、プロペラの軽量化、マウント金具のアルミ化→CFRP化。先端質量を120 g → 80 g に削減できれば、固有振動数は約100 Hzまで上昇し、ホバリング周波数との間に余裕が生まれる。
対策③:運用上の共振回避(モーター回転数域の制限) フライトコントローラーのパラメータで、83 Hz付近のモーター回転数(約4,980 RPM)を通過する際の滞留時間を最小化する制御を実装する。ただし、これは設計的解決ではなく運用的回避であり、審査官への説明としては対策①・②を主軸とすべきだ。
安全評価表のまとめ(申請書記載用)
| 評価項目 | 算出値 | 安全判定基準 | 判定 |
|---|---|---|---|
| アーム断面二次モーメント $I$ | $4.637 \times 10^{-9}$ m⁴ | — | 基礎データ |
| アーム単体の一次固有振動数 | 267.5 Hz | — | 参考値 |
| 先端質量考慮後の固有振動数 $f_{n,\text{corrected}}$ | 83.1 Hz(※要設計変更) | $f_n > 1.5 \times f_{\text{max}}$ = 212.6 Hz | NG |
| 設計変更後(外径25 mm・内径20 mm) | 約158 Hz(推定) | 同上 | 再評価要 |
| アーム先端たわみ量(変動荷重9.81 N) | 0.272 mm | $\delta / L < 0.5%$ | OK |
| モーター使用回転数域 | 5,500〜8,500 RPM (91.7〜141.7 Hz) | — | 基礎データ |
この表は一つの重要なメッセージを伝えている。「計算したら安全でした」だけが申請書の価値ではない。「計算したら危険が見つかったので、設計変更で対処しました」という経緯そのものが、審査官に対する最大の信頼構築手段となる。
物理的に危険を事前検知し、設計で排除する——この能力を示すことが、カテゴリーIII飛行許可を勝ち取るための本質的な戦略だ。
第7回では、この構造力学の知見をさらに発展させ、農薬散布・配送ドローンにおける重心(CG)の動的変化が引き起こす墜落メカニズムを解析する。液体や荷物が飛行中に移動することで重心が変わり、機体が制御不能に陥る——その現象を「静的安定性」と「動的安定性」の二つの視点から定量化する方法を提示する。
また、第8回・第9回の慣性モーメントの議論は、本稿で扱った断面二次モーメント $I$(形状の曲げにくさ)と対をなす概念であり、「回転のしにくさ」を質量分布から算出する。本稿の $I$(m⁴)と第8回の $I$(kg·m²)は記号は同じでも物理的意味が異なることを、ここで予告しておく。そして第28回では、本稿で導入した固有振動数の概念を共振周波数として全面的に展開し、「魔の回転数」の特定と回避をさらに高度な手法で解説する。

コメント