

1. 第三者上空飛行審査で、あなたはこう詰められる
カテゴリーIII飛行の審査。航空局の担当官が、あなたの申請書類を静かに閉じてこう言った。
「この飛行経路、住宅密集地の上空を通過しますよね。万が一、落下した場合だけでなく……飛んでいる間も、地上の人に危険はないんですか?」
多くの事業者がここで言葉を詰まらせる。「落下時のリスク」については運動エネルギーの計算(第19回で詳述)で答えられる。しかし、担当官が問いかけているのは飛行中の機体そのものが、地上に何をしているかだ。
答えはひとつ。ダウンウォッシュ(downwash)——プロペラが押し出す下向きの高速気流である。
あなたが6kgの産業用マルチコプターを人の頭上10mで飛行させるとき、プロペラの直下では時速30kmを超える風が鉛直下向きに吹き付けている。乳幼児や高齢者であれば、その圧力は転倒を引き起こすに十分だ。砂粒・礫・砂利は武器に変わる。工事現場の粉塵は作業員の目を直撃する。
そして最悪のシナリオは別にある。ダウンウォッシュが作業者・歩行者の傘・幟(のぼり)・テントに作用し、それが機体のプロペラへと吸い込まれ、機体を墜落させるという相互作用による連鎖崩壊だ。
担当官はこれを直感的に恐れている。あなたはそれに対し、数値で答えなければならない。
「ダウンウォッシュの風速は○m/sです。地上10mでの動圧は○Paです。安全離隔距離は○mと算定しています。根拠はニュートンの第三法則と運動量理論の連立計算です。」
この一文を書類に記載できた者だけが、許可を得る。
2. ニュートンの第三法則:最も単純で、最も深遠な物理の刃
今回の中心となる物理法則は、あらゆる力学の根幹に位置する。
$$\vec{F}_{A \to B} = -\vec{F}_{B \to A}$$ニュートンの第三法則(作用・反作用の法則):物体Aが物体Bに力を加えるとき、物体Bは同じ大きさで逆向きの力を物体Aに加える。
中学物理の教科書に載るこの式が、なぜドローン飛行許可申請に「最も強力な武器」となるのか。
理由は明白だ。ドローンが空中に静止している、その事実そのものが第三法則の生きた証明だからである。機体が重力に抗って空に浮かんでいる、ということは、機体が「何か」を押し下げており、その反力として「何か」が機体を押し上げているということに他ならない。
その「何か」とは、空気だ。
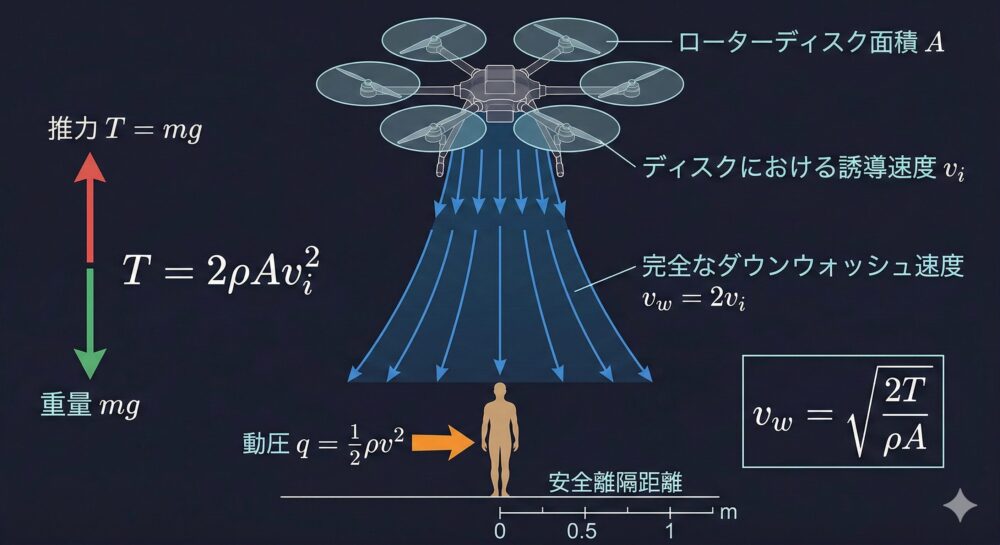
プロペラは空気を下向きに加速する。空気は加速された運動量を持ち、その反力としてプロペラを——機体を——上向きに押す。これが推力の正体であり、ダウンウォッシュが発生する根本原理である。
つまり、推力と地上へのダウンウォッシュ影響は、同一の物理現象のコインの裏表だ。機体が空に浮かんでいる限り、地上への風の影響は物理的必然として存在する。この原理を理解し、定量化することが、第三者上空飛行の「安全証明書」の本質となる。
3. 作用・反作用からダウンウォッシュ速度まで、完全に導く
3-1. 推力発生の物理的正体
機体が空中に静止(ホバリング)しているとき、鉛直方向の力の釣り合いは次式で表される。
$$T = mg$$
ここで:
- $T$:全ローターの合計推力 $[\mathrm{N}]$
- $m$:機体の総質量(ペイロード含む) $[\mathrm{kg}]$
- $g$:重力加速度 $= 9.81\ \mathrm{m/s^2}$
この推力 $T$ は、ローターが空気に与える運動量の時間変化率に等しい(ニュートンの第二法則と第三法則の連結)。
$$T = \dot{m}_{air} \cdot v_w$$
ここで:
- $\dot{m}_{air}$:ローター面を通過する空気の質量流量 $[\mathrm{kg/s}]$
- $v_w$:ダウンウォッシュの速度(ローター直下の誘導速度) $[\mathrm{m/s}]$
3-2. 運動量理論によるダウンウォッシュ速度の導出
ローター面積 $A$(全ローターのディスク面積の合計)を通過する質量流量は:
$$\dot{m}_{air} = \rho \cdot A \cdot v_i$$
ここで:
- $\rho$:空気密度(標準大気、海面高度、15℃において $\rho = 1.225\ \mathrm{kg/m^3}$)
- $v_i$:ローター面での誘導速度(ディスク面における局所風速) $[\mathrm{m/s}]$
運動量理論(第36回で詳述)によれば、ローター遠方下流でのダウンウォッシュ速度 $v_w$ はディスク面での誘導速度 $v_i$ のちょうど2倍に収束する。
$$v_w = 2v_i$$
これをホバリング推力の式に代入する。
$$T = \rho \cdot A \cdot v_i \cdot 2v_i = 2\rho A v_i^2$$
$v_i$ について解くと:
$$\boxed{v_i = \sqrt{\frac{T}{2\rho A}}}$$
そして、完全発達したダウンウォッシュ速度(遠方下流での値):
$$\boxed{v_w = 2v_i = 2\sqrt{\frac{T}{2\rho A}} = \sqrt{\frac{2T}{\rho A}}}$$
この式こそ、審査官への回答の根幹となる。推力(=機体重量)とローターの総面積だけから、地上に降り注ぐ風速を計算できるのだ。
3-3. ダウンウォッシュの動圧:地上への「力」を定量化する
風速を算出したら、次にその風が物体に与える動圧(dynamic pressure) $q$ を計算する。
$$q = \frac{1}{2}\rho v^2 \quad [\mathrm{Pa}]$$
この動圧に受圧面積 $S$ を乗じた値が、物体が受ける力 $F$ となる。
$$F = q \cdot S \cdot C_D = \frac{1}{2}\rho v^2 \cdot S \cdot C_D \quad [\mathrm{N}]$$
ここで $C_D$ は抗力係数(人体の場合は正面から見た投影面積に対して $C_D \approx 1.0$〜$1.3$ が実測値として用いられる)。
3-4. 高度による風速の減衰:逆二乗則との関係
理想的な点音源(または点状の勢力源)が放射する影響は距離の二乗に反比例するが、ダウンウォッシュは有限面積のディスクから放射されるジェット流に近い。より正確には、軸対称の自由噴流(free jet)のモデルが適用され、軸上の速度は噴流出口からの距離 $z$ に対して以下のように減衰する。
$$v(z) = v_w \cdot \frac{D}{K \cdot z}$$
ここで:
- $D$:等価ローターディスク径(全ローター面積を1枚の円盤に換算した直径)
- $z$:ローターディスクからの鉛直距離 $[\mathrm{m}]$
- $K$:噴流拡散定数(実験的に $K \approx 0.1$〜$0.15$ が用いられる)
この減衰式が重要なのは、「機体の飛行高度を高くすれば地上へのダウンウォッシュ影響が低減する」という定量的な根拠を与えてくれるからだ。飛行高度と安全離隔距離は、この式から逆算して導出できる。
4. 産業用ヘキサコプターでのダウンウォッシュを完全シミュレーションする
実際の申請書類に記載できる水準の計算を、ステップバイステップで示す。
ケーススタディ:DJI Matrice 350 RTK 相当スペックの産業用機
申請する飛行の概要:
- 飛行目的:橋梁下面の目視外点検(DID地区内、居住者の通行あり)
- 飛行高度:地上から20m
- 機体総重量(ペイロード含む):$m = 6.5\ \mathrm{kg}$
機体諸元(申請書類記載値):
| パラメータ | 値 |
| ローター枚数 | 6枚 |
| ローター直径 | 0.38 m |
| 1枚のローターディスク面積 | $A_1 = \pi (0.19)^2 \approx 0.1134\ \mathrm{m^2}$ |
| 全ローターディスク面積 | $A = 6 \times 0.1134 \approx 0.680\ \mathrm{m^2}$ |
| 総重量 | 6.5 kg |
STEP 1:ホバリング推力を算出する
$$T = mg = 6.5 \times 9.81 = 63.765\ \mathrm{N}$$
STEP 2:ローター面での誘導速度 $v_i$ を算出する
標準大気条件($\rho = 1.225\ \mathrm{kg/m^3}$)を適用する。
$$v_i = \sqrt{\frac{T}{2\rho A}} = \sqrt{\frac{63.765}{2 \times 1.225 \times 0.680}} = \sqrt{\frac{63.765}{1.666}} = \sqrt{38.27} \approx 6.19\ \mathrm{m/s}$$
STEP 3:完全発達ダウンウォッシュ速度 $v_w$ を算出する
$$v_w = 2v_i = 2 \times 6.19 \approx 12.4\ \mathrm{m/s}$$
これは時速換算で約 $\mathbf{44.6\ km/h}$ に相当する。気象庁の風速階級では「強い風」(風速10〜15 m/s)に分類される風が、プロペラ直下に発生している。
STEP 4:飛行高度(地上20m)でのダウンウォッシュ速度を算出する
等価ローター径を計算する。全ローター面積を1枚の等価円盤と見なして:
$$D_{eq} = 2\sqrt{\frac{A}{\pi}} = 2\sqrt{\frac{0.680}{3.1416}} = 2\sqrt{0.2165} = 2 \times 0.465 = 0.930\ \mathrm{m}$$
自由噴流モデルによる地上面($z = 20\ \mathrm{m}$)での風速。ここでは保守的な値として $K = 0.10$ を採用する:
$$v(20) = v_w \cdot \frac{D_{eq}}{K \cdot z} = 12.4 \times \frac{0.930}{0.10 \times 20} = 12.4 \times \frac{0.930}{2.00} = 12.4 \times 0.465 \approx 5.77\ \mathrm{m/s}$$
地上に到達する段階でも、約 $\mathbf{5.8\ m/s}$(時速約 $\mathbf{20.8\ km/h}$)の風速が発生する計算となる。
STEP 5:地上の人体への動圧・力を算出する
$$q = \frac{1}{2} \rho v^2 = \frac{1}{2} \times 1.225 \times (5.77)^2 = 0.6125 \times 33.29 \approx 20.4\ \mathrm{Pa}$$
成人の正面投影面積を $S = 0.6\ \mathrm{m^2}$、抗力係数を $C_D = 1.1$ と仮定すると:
$$F = q \cdot S \cdot C_D = 20.4 \times 0.6 \times 1.1 \approx 13.5\ \mathrm{N}$$
これは約 1.37 kgf の横向き(下向き)の力が人体に作用することを意味する。健常な成人に対しては転倒リスクは低いが、幼児(体重15 kg)や高齢者の場合は重心動揺が生じ得る圧力域に入る。
STEP 6:安全離隔距離の逆算
地上への影響を「風速3 m/s以下(気象庁:やや強い風の下限、傘が反転し始める強さ)」以内に抑えることを安全基準とする場合:
$$3.0 = 12.4 \times \frac{0.930}{0.10 \times z}$$
$$0.10 \times z = 12.4 \times \frac{0.930}{3.0} = 3.844$$
$$\boxed{z \geq 38.4\ \mathrm{m}}$$
すなわち、この機体が第三者の直上を飛行する場合、安全離隔距離として最低38m以上の飛行高度が物理的に要求されることが導き出せる。
DID地区での飛行申請においてこの計算を書類に添付することで、「飛行高度20mでの第三者通行を許可した場合に生じるダウンウォッシュ風速は5.8 m/sであり、これに対して水平方向への退避経路の確保および立入制限区画の設定により安全を担保する」という具体的・科学的な安全論証が成立する。
補足:作用・反作用が生む「もう一つのリスク」——吸い込みによる機体への反作用
ダウンウォッシュが強力な下降気流を形成すると同時に、その周囲ではベルヌーイの定理(第34・35回で詳述)に従い、周辺の空気がローターへと吸い込まれる上昇流が形成される。
この現象はボルテックス・リング・ステート(第39回参照) と表裏一体の問題であり、低高度ホバリング時には:
- 地面によってダウンウォッシュが水平方向に拡散する(地面効果:第38回)
- 拡散した空気が再度ローターへと再循環(recirculation)する
- ローターへの入射空気の運動量が変化し、推力係数が不安定になる
これが低高度でホバリング中の機体が「フワフワ」と不安定になる物理的正体であり、かつ地上の異物(紙・ビニール・落ち葉)が巻き上げられてプロペラに吸い込まれる事故の原因でもある。
第三者上空飛行の申請においては、このリサーキュレーション領域の高度範囲も計算し、「当該高度では意図的なホバリングを行わない」ことを運航手順書(Operations Manual)に明記することが望ましい。
まとめ:この計算があれば、審査官は沈黙する
今回の計算で導き出した数値を、申請書類の「安全評価」欄に記載するとする。
「本機体のホバリング時における完全発達ダウンウォッシュ速度は $v_w \approx 12.4\ \mathrm{m/s}$ と算定される。自由噴流減衰モデル($K = 0.10$)に基づき、飛行高度20mにおける地上面到達風速は $v(20) \approx 5.8\ \mathrm{m/s}$ と予測される。本値は気象庁「やや強い風」区分(5〜10 m/s)の下限に相当するため、飛行ルート直下への第三者立入を禁止する安全区画(水平半径○m)を設定し、監視員を配置することにより、第三者への物理的影響を排除した飛行環境を構築する。」
これが、作用・反作用の法則を「実務のツール」として使いこなした結果だ。
「なんとなく危なさそう」という感覚論に対して、あなたは今、数値で応答できる。これが、物理を知る者と知らない者との間に生まれる、圧倒的な差だ。
次回(第4回)は「慣性の法則」——ドローンは急に止まれないという当たり前の事実が、「制動距離」の計算と、経路上への第三者進入時の衝突リスク評価にいかに直結するかを解説する。

コメント