

1. 審査官はこう詰めてくる——「止まれなかったら、どうするんですか」
想像してほしい。
あなたは都市部の幹線道路上空での自律飛行ルートを申請している。飛行高度は地上15m。ルート上には横断歩道があり、歩行者が通過する可能性がある。審査官はルート図を指さして、静かにこう言った。
「この横断歩道の手前で、ドローンは止まれますか?」
「はい、止まれます」——そう答えた瞬間に、次の問いが来る。
「何メートル前から減速を開始すれば、横断歩道の手前で確実に停止できますか?その根拠は?」
この問いに対し、「フライトコントローラーが自動で制御します」「センサーが検知します」という回答は、審査官に対してまったく機能しない。なぜなら彼らが求めているのは「システムへの信頼」ではなく、「物理的な根拠に基づく安全余裕(safety margin)の証明」だからだ。
ここで多くの事業者が詰まる。
ドローンは自動車ではない。ブレーキペダルを踏んで摩擦力で止まるのではなく、プロペラの回転を逆制御することによって発生する「逆推力」と、機体に常時働く空気抵抗によって減速する。この物理プロセスを理解せずに「止まれます」と言っても、審査官の目には「根拠なき楽観主義」にしか映らない。
さらに深刻なのは、自律飛行システムが想定外の事態(強風、センサー誤検知、通信遅延)に遭遇したとき、機体は指令を受けてから実際に停止するまでの間、慣性によって前進し続けるという冷酷な物理的事実だ。
その「前進し続ける距離」こそが制動距離であり、この数値を書類に記載できた者だけが、都市部の自律飛行許可を手にする。
2. 【武器の提示】慣性の法則——「動いているものは、放っておけばいつまでも動き続ける」
今回の主役はニュートンの第一法則。別名、慣性の法則だ。
「外力が働かない限り、静止している物体は静止し続け、運動している物体は等速直線運動を続ける。」
数式で表すと:
$$\sum \vec{F} = 0 \implies \vec{v} = \text{const}$$
「そんな当たり前のことが、なぜ飛行許可に関係するのか」と思うかもしれない。
関係する。それも、致命的なレベルで関係する。
時速40km(約11 m/s)で自律飛行中のドローンがある。制御システムが「停止命令」を発した。しかしその瞬間、機体はまだ11 m/sで前進している。命令を受けて逆推力が発生するまでには応答遅延(レイテンシ)がある。逆推力が発生しても、速度がゼロになるまでには時間と距離が必要だ。
その間、機体は何もしなくても前へ進み続ける。これが慣性だ。
慣性は「悪い力」ではない。それは物体が持つ根本的な性質——質量があるから、力を加えなければ速度は変化しないという、宇宙の根本ルールだ。しかしこのルールは、ドローンが人間の頭上を飛ぶ以上、「安全の敵」として正確に把握し、数値として管理しなければならない。
3. 慣性とは何か——そしてなぜドローンは「思ったより止まれない」のか
3-1. まず「慣性」を身体で理解する
難しい数式の前に、日常の経験で慣性を捉え直してほしい。
【例1:買い物カート】 空のカートは軽く押すだけで動き、軽く引くだけで止まる。しかし飲料水を満載にしたカートは、同じ力では全く動かず、止めようとしてもなかなか止まらない。これは質量が大きいほど慣性が大きいからだ。ドローンも全く同じ——ペイロードが重いほど、止まるのに必要な力と距離が増大する。
【例2:自転車での急ブレーキ】 時速30kmで走る自転車のブレーキを全力で握っても、即座には止まれない。タイヤと路面の摩擦力がどれだけ大きくても、速度ゼロになるまでには数メートルの距離が必要だ。この「数メートル」の中に人がいれば、衝突は避けられない。ドローンの制動距離も、まったく同じ論理で計算される。
【例3:宇宙空間での宇宙船】 映画でよく見る光景——エンジンを切った宇宙船が、何の抵抗もなくどこまでも飛んでいく。これは慣性の純粋な姿だ。地球の大気中を飛ぶドローンには空気抵抗という「自然なブレーキ」があるが、それは非常に弱い。速度を積極的に落とすには、逆推力の制御が不可欠だ。
3-2. 「慣性の大きさ」は質量が決める
慣性の大きさは、物体の質量 $m$(単位:kg)で決まる。これを定式化したのがニュートンの第二法則だ(第5回で詳述するが、今回の計算でも使用する)。
$$\vec{F} = m\vec{a}$$
力 $F$、質量 $m$、加速度 $a$(ここでは減速なので負の加速度、すなわち「負の加速=減速」)。
同じ制動力(逆推力+空気抵抗)が働いても、質量が2倍なら減速度は半分になり、止まるのに必要な時間・距離は2倍以上になる。
$$a = \frac{F}{m}$$
これが、ペイロードが重い機体ほど制動距離が長くなる直接的な理由だ。
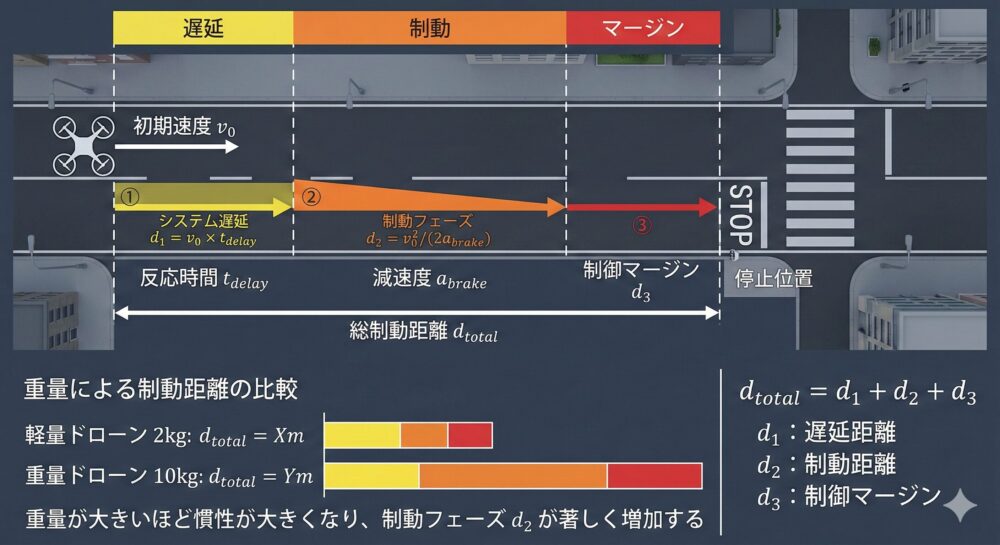
3-3. ドローンの「止まるプロセス」を3段階に分解する
ドローンが停止するまでのプロセスは、以下の3段階から成る。それぞれに「距離」が発生する。
【第1段階】システム応答遅延(反応時間)
停止命令の発令から、実際に逆推力が発生し始めるまでの時間。この間、機体は慣性のままで等速運動を続ける。
$$d_1 = v_0 \cdot t_{delay}$$
- $v_0$:停止命令発令時の初速度 $[\mathrm{m/s}]$
- $t_{delay}$:システム応答遅延時間 $[\mathrm{s}]$(一般的な産業用機では0.1〜0.3秒)
【第2段階】逆推力による減速
フライトコントローラーが機体をピッチバック(後傾)させ、前進方向と逆向きの推力ベクトル成分を発生させる段階。この間は等加速度減速運動として近似できる。
$$d_2 = \frac{v_0^2 – v_f^2}{2a_{brake}}$$
- $a_{brake}$:制動加速度(減速度) $[\mathrm{m/s^2}]$(機体最大ピッチ角と推力から算出)
- $v_f$:速度(完全停止なら $v_f = 0$)
【第3段階】完全停止への収束
速度がゼロに近づくにつれ、制御系がハンチング(oscillation)を起こさないよう逆推力を漸減させる段階。この段階は機体によってPID制御の特性に依存するが、安全計算では保守的に追加マージンを確保する。
$$d_3 = \text{(制御マージン、通常}\ d_2 \times 0.1\text{〜}0.2\text{として加算)}$$
総制動距離:
$$\boxed{d_{total} = d_1 + d_2 + d_3}$$
3-4. 制動加速度 $a_{brake}$ はどこから来るのか
ここが実務計算の核心だ。ドローンには自動車のような物理的なブレーキがない。制動力は以下の2つの合力だ。
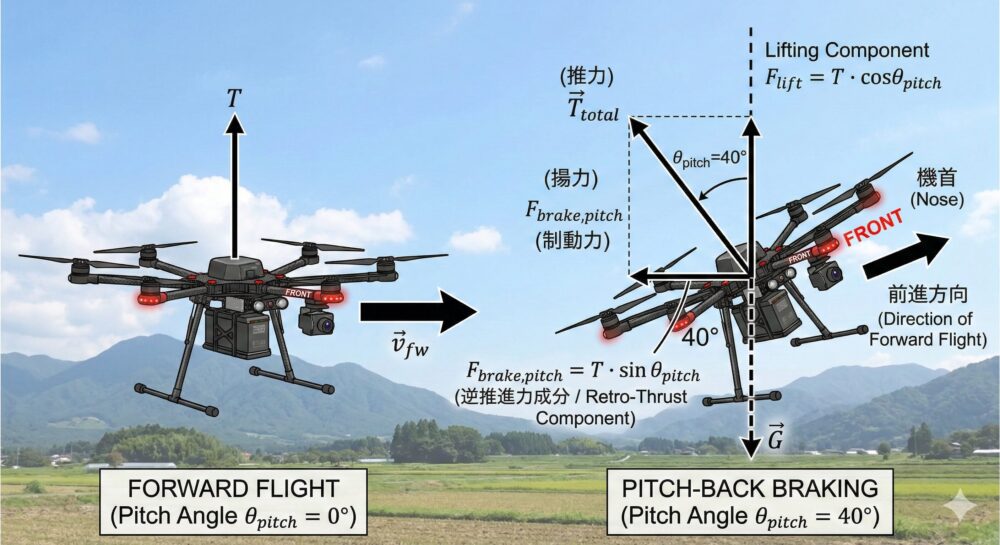
① ピッチバックによる逆推力成分
前進飛行中に機首を後ろへ傾ける(ピッチバック)と、推力ベクトルが後方に傾き、前進方向と反対の力が発生する。
$$F_{brake,pitch} = T \cdot \sin\theta_{pitch}$$
ここで $\theta_{pitch}$ は後傾ピッチ角 $[\deg]$。
最大制動時のピッチ角は機体仕様で規定されるが、安全飛行では30〜45°が上限とされることが多い(これ以上傾けると、高度を維持するための鉛直方向推力成分が不足する)。
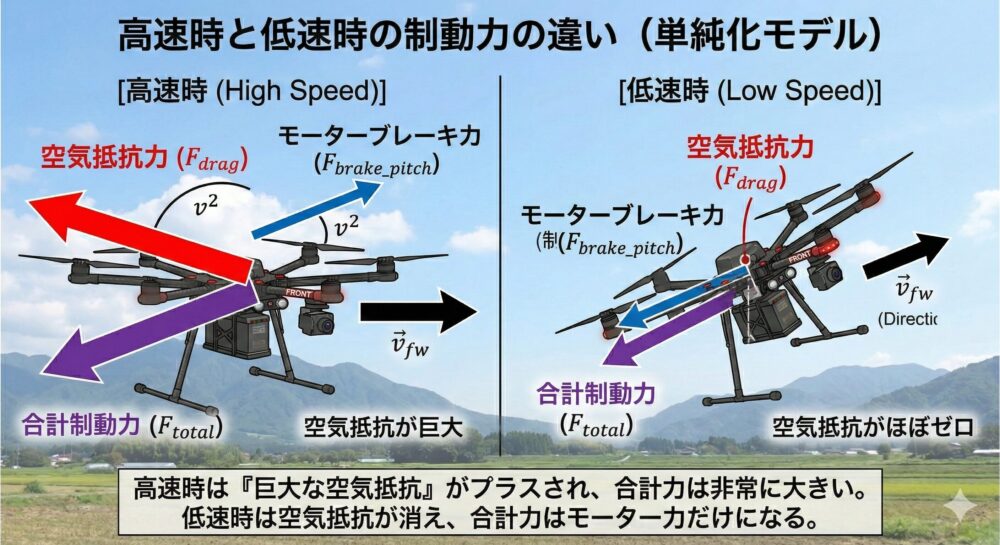
② 空気抵抗(抗力)
$$F_{drag} = \frac{1}{2}\rho C_D S v^2$$
ここで $C_D S$(抗力係数×前面投影面積)は機体の形状で決まる定数だ。注意すべきは、空気抵抗は速度の二乗に比例するため、高速時は大きく効くが、速度が下がると急速に小さくなる点だ。低速域での制動は、ほぼピッチバック逆推力に依存することになる。
合計制動力と制動加速度:
$$F_{total} = F_{brake,pitch} + F_{drag}$$
$$a_{brake} = \frac{F_{total}}{m}$$
「モーターブレーキ力」とは、ひとことで言うと「プロペラの推力(風)の向きを物理的に変えて作る、逆噴射の力」のことです。
具体的には、次のような現象が起きています。
- 機首を上げる(ピッチバック): 前進中、ブレーキをかけるために機体の前側を上にグッと持ち上げます。
- 風の向きが斜め前になる: 普段は機体を浮かすために「真下」へ向かっていたプロペラの風が、機体が傾いたことで「斜め前」に向かって吹き出すようになります。
- 逆方向への推力(反動)が生まれる: 空気を「前」へ押し出す反動(作用・反作用)で、機体は「後ろ」へ押し返されます。
つまり、車のようにタイヤの摩擦を使って止まるのではなく、モーターとプロペラのパワーそのものを進行方向と逆向きに向けて、機体を後ろに引っ張る力(逆推力)のことです。
機首を同じ角度(例えば40度)上げた場合、モーターによる逆推力($T \sin\theta$)の大きさ自体は、高速で飛んでいても低速で飛んでいても同じなんです。
では何が違うのかというと、以下のようになります。
- 高速のときモーターの逆推力($T \sin\theta$)に加えて、「目に見えない巨大な空気の壁(空気抵抗)」が前からドーンとぶつかってきます(空気抵抗は速度の2乗で巨大化するため)。この「モーターの力」+「空気の壁」のダブルの力で、機体は急激に減速します。
- 低速のとき速度が落ちると、その「空気の壁」がスッと消えてなくなります。そのため、機体を完全に停止させるための最後のひと踏ん張りは、ご自身が仰った「$T \sin\theta$(モーターの逆推力)」の力だけに頼らざるを得なくなります。
つまり、「スピードが出ている時は空気抵抗がガツンとブレーキを手伝ってくれるが、止まる直前の低速域では $T \sin\theta$ のモーターの力だけでヨイショと止まらなければならない」という物理的な変化が起きている、
4. 自律飛行ドローンの制動距離を、申請書類に記載できる水準で算出する
ケーススタディ:都市部橋梁点検での自律飛行申請
飛行条件:
| パラメータ | 値 |
|---|---|
| 機体総重量 | $m = 5.0\ \mathrm{kg}$ |
| 巡航速度 | $v_0 = 10.0\ \mathrm{m/s}$(時速36 km/h) |
| 最大制動ピッチ角 | $\theta_{pitch} = 30°$ |
| ローター推力(ホバリング値) | $T = mg = 49.05\ \mathrm{N}$ |
| 機体前面投影面積×抗力係数 | $C_D S = 0.10\ \mathrm{m^2}$(産業用機の実測値目安) |
| 空気密度 | $\rho = 1.225\ \mathrm{kg/m^3}$ |
| システム応答遅延 | $t_{delay} = 0.2\ \mathrm{s}$(保守値) |
STEP 1:第1段階——応答遅延中の走行距離 $d_1$ を算出する
$$d_1 = v_0 \cdot t_{delay} = 10.0 \times 0.2 = 2.0\ \mathrm{m}$$
停止命令が出た瞬間から0.2秒間、機体は何もできずに2mを前進し続ける。たったの0.2秒で2m——これが慣性の現実だ。
STEP 2:第2段階——制動力と制動加速度を算出する
ピッチバック逆推力:
$$F_{brake,pitch} = T \cdot \sin 30° = 49.05 \times 0.500 = 24.5\ \mathrm{N}$$
巡航速度10 m/s時の空気抵抗(制動開始時点の最大値):
$$F_{drag,initial} = \frac{1}{2} \times 1.225 \times 0.10 \times (10.0)^2 = 0.06125 \times 100 = 6.1\ \mathrm{N}$$
合計制動力(保守的に空気抵抗は定常値として扱わず、初期値の平均50%で概算):
実際には速度低下とともに空気抵抗は減少する。保守的な計算のために、空気抵抗の貢献を初期値の50%に割り引いて計算する。
$$F_{total} \approx 24.5 + (6.1 \times 0.5) = 24.5 + 3.05 = 27.6\ \mathrm{N}$$
制動加速度:
$$a_{brake} = \frac{F_{total}}{m} = \frac{27.6}{5.0} = 5.52\ \mathrm{m/s^2}$$
重力加速度 $g = 9.81\ \mathrm{m/s^2}$ との比で表すと約 $0.56g$——つまりこの機体は、最大制動時に重力の約半分の「ブレーキ力」しか発揮できない。
STEP 3:第2段階——制動距離 $d_2$ を算出する
等加速度減速運動の公式 $v_f^2 = v_0^2 – 2a \cdot d$ を変形して:
$$d_2 = \frac{v_0^2}{2 \cdot a_{brake}} = \frac{(10.0)^2}{2 \times 5.52} = \frac{100}{11.04} \approx 9.06\ \mathrm{m}$$
STEP 4:第3段階——制御マージン $d_3$ を加算する
$$d_3 = d_2 \times 0.15 = 9.06 \times 0.15 \approx 1.36\ \mathrm{m}$$
STEP 5:総制動距離を算出する
$$d_{total} = d_1 + d_2 + d_3 = 2.00 + 9.06 + 1.36 = \boxed{12.4\ \mathrm{m}}$$
時速36kmで巡航する5kgの産業用ドローンは、停止命令から完全停止まで約12.4mを前進し続ける。
直感的な比較——12.4mとは、どれくらいの距離か
この数値を「感覚」に変換しよう。
| 比較対象 | 距離 |
|---|---|
| 乗用車(時速40km、急ブレーキ) | 約8〜11m |
| バス1台の長さ | 約10〜12m |
| 本計算の制動距離 | 約12.4m |
| 小学校の教室の縦の長さ | 約9m |
| 横断歩道の幅(標準) | 約4〜6m |
つまり停止命令を出す時点で、機体と停止目標点の間には最低13m以上の「制動余裕距離」が必要だ。横断歩道の手前でドローンを止めたければ、横断歩道まで13m以上の距離がある時点で停止命令を発令するように、経路設計とセンシング計画を組まなければならない。
STEP 6:風の影響を加味した補正計算
実際の飛行では、向かい風または追い風が制動距離を大きく変化させる。
追い風 $v_{wind}$ がある場合(最も危険なケース):
機体が地上から見て $v_0$ で飛行していても、空気に対する相対速度は $v_0 – v_{wind}$ に低下する(追い風では空気抵抗が減少する)。また、追い風は機体を前方に押し続けるため、制動力に対抗する力として作用する。
追い風を考慮した等価制動加速度:
$$a_{brake,corrected} = \frac{F_{brake,pitch} – F_{wind}}{m}$$
ここで $F_{wind} = \frac{1}{2}\rho C_D S \cdot v_{wind}^2$ は追い風による前方推力。
例えば $v_{wind} = 5\ \mathrm{m/s}$(秒速5m、気象庁「やや強い風」)の追い風の場合:
$$F_{wind} = \frac{1}{2} \times 1.225 \times 0.10 \times 25 = 1.53\ \mathrm{N}$$
$$a_{brake,corrected} = \frac{24.5 – 1.53}{5.0} = \frac{22.97}{5.0} = 4.59\ \mathrm{m/s^2}$$
$$d_2′ = \frac{100}{2 \times 4.59} = 10.9\ \mathrm{m}$$
$$d_{total,wind} = 2.0 + 10.9 + 1.6 = \mathbf{14.5\ m}$$
追い風5m/sだけで、制動距離が12.4mから14.5mへ、約2.1m延伸する。申請書類の「風速条件」の欄に想定最大風速を記載し、それに対応した制動距離を計算しておくことが、審査官への誠実な安全証明となる。
STEP 7:「機体重量が変わったら」——ペイロード変動の影響を見る
ここで農薬散布ドローンや配送ドローンの事業者に特に注意してほしい点がある。
ペイロードが変わると、制動距離も変わる。
同じ機体・同じ速度・同じ最大ピッチ角で、ペイロード満載($m = 10\ \mathrm{kg}$)の場合を計算してみる。
$$T’ = m’g = 10.0 \times 9.81 = 98.1\ \mathrm{N}$$
$$F_{brake,pitch}’ = 98.1 \times \sin 30° = 49.05\ \mathrm{N}$$
$$a_{brake}’ = \frac{49.05 + 3.05}{10.0} = \frac{52.1}{10.0} = 5.21\ \mathrm{m/s^2}$$
(推力も増えるため、加速度の低下は緩やかだが……)
$$d_2′ = \frac{100}{2 \times 5.21} = 9.6\ \mathrm{m}$$
$$d_{total}’ = 2.0 + 9.6 + 1.44 = \mathbf{13.0\ m}$$
推力が増えた分、制動加速度も上昇するため制動距離の延伸は比較的小さい。しかし問題は別にある——重い機体は同じ制動距離を確保するために、より大きなピッチ角と推力が必要となり、高度維持とのトレードオフが発生する。つまり「空中で激しくブレーキをかけると、同時に高度も下がり始める」という複合リスクが生じるのだ(この問題は第5回「運動方程式」でベクトル分解を用いて詳細に論じる)。
申請書類への記載例——この計算を「書類の言葉」に翻訳する
以下のような文章を、安全評価書の「経路安全性の根拠」欄に記載する。
「本運航計画における巡航速度 $v_0 = 10.0\ \mathrm{m/s}$ 、機体総重量 $m = 5.0\ \mathrm{kg}$ の条件下において、慣性の法則および等加速度減速モデルに基づく総制動距離は $d_{total} \approx 12.4\ \mathrm{m}$(想定最大追い風 $5\ \mathrm{m/s}$ 時は $14.5\ \mathrm{m}$)と算定される。これを踏まえ、経路上の全停止目標点(交差点・横断歩道・施設境界線等)から上流側15m以上の地点に「制動開始トリガーウェイポイント」を設定し、自律飛行システムに事前登録する。加えて、監視員は飛行経路末端から30m以上の離隔を保ち、第三者の侵入を確認した時点で直ちに停止命令を発令できる体制を維持する。」
この一段落が書けるかどうかで、許可の可否が変わる。
まとめ:慣性を「知っている事業者」と「知らない事業者」の差
今回の計算で明らかになったことを整理する。
時速36kmで飛ぶ5kgのドローンは、停止命令から完全停止まで約12〜15mを前進し続ける。これはバス1台分の長さだ。この事実を知らずに「止まれます」と申請した事業者と、「最大14.5mの制動距離が発生するため、15m手前にウェイポイントを設定します」と申請した事業者——審査官がどちらを信頼するかは、言うまでもない。
慣性の法則は、「外力がなければ速度は変わらない」という単純な原理だ。しかしその原理が、都市部自律飛行の安全設計の根幹に直結している。
次回(第5回)は、この「慣性に逆らって機体を動かす力」——ニュートンの運動方程式 $F = ma$ を徹底解剖する。突風が吹いたとき、機体は横にどれだけ流されるのか。その流され距離を事前にシミュレーションし、飛行経路の「横方向安全マージン」を算出する手法を解説する。

コメント