

第1節 役所の「風に飛ばされたら?」という一言が飛行許可を葬る
飛行許可申請の審査面談において、担当官から最も多く突きつけられる質問のひとつが、次の一言である。
「突風が吹いたとき、機体はどこまで流されるのですか?」
「万が一、制御が失われた場合、第三者の頭上に落下する可能性はゼロですか?」
この問いに対し、「機体の性能が高いので大丈夫です」「経験豊富なパイロットが対処します」などという主観的な回答は、審査の場では通用しない。担当官が求めているのは、数値による証明である。
飛行経路の半径内に第三者が存在し得る空域——特にDID(人口集中地区)上空や重要インフラ周辺での飛行においては、「機体が風で最大何メートル横にずれるか」を物理的に計算し、その値が安全バッファの内側に収まることを証明できなければ、許可は下りない。
現場の実務担当者が陥りがちな失敗パターンは、以下の3つに集約される。
① 「機体スペック表の最大耐風速以下だから安全」という主張 :これは静止した機体に対する定格値であり、飛行中の動的な挙動を保証するものではない。
② 「フライトコントローラーが自動補正する」という主張 :自動補正には物理的な限界がある。補正が間に合うまでの間に、機体はすでに横方向へ移動している。
③ 「今まで問題なかった」という実績論 :ヒヤリハットが事故の統計的前兆であることを担当官は熟知している。過去の経験談は、科学的根拠の代替にはならない。
これらの主張が却下される根本的な理由は、「機体に加わる力と、その結果として生じる加速度・変位を計算していない」ことに尽きる。本稿で解説するニュートンの運動方程式 $F = ma$ こそ、この計算を可能にする唯一の武器である。
第2節 解決の武器:F = ma ── 「力」を「変位」に変換する翻訳機
ニュートンの第二法則(運動の法則)を、教科書的に覚える必要はない。実務家にとって重要なのは、この式が何を「翻訳」してくれるのかを理解することだ。
$$\boxed{F = m \times a}$$
| 記号 | 物理量 | ドローン実務での対応物 | 単位 |
|---|---|---|---|
| $F$ | 力(Force) | 突風の横方向推力 / 重力 / 機体の推力 | N(ニュートン) |
| $m$ | 質量(Mass) | 機体 + ペイロードの総重量 | kg |
| $a$ | 加速度(Acceleration) | 機体がどれだけ速く速度を変化させるか | m/s² |
この式の真価は「連鎖反応」にある。力($F$)が決まれば加速度($a$)が決まる。加速度が決まれば、時間経過とともに速度と変位が計算できる。つまり、
$$\text{突風の風速(気象データ)} \longrightarrow F \longrightarrow a \longrightarrow \text{横方向移動距離} x$$
この「翻訳の連鎖」が、安全距離の科学的証明を可能にする。連鎖を正確に辿ることができれば、「突風 $v$ m/s で最大 $t$ 秒間制御不能に陥った場合、機体は横方向に $x$ m 流される」という定量的なリスク評価書を作成できる。
第3節 メカニズムの厳密な解説:力から変位までの完全な物理構造
3.1 機体に働く4つの力を整理する
空中を飛行するドローンには、常に複数の力が同時に作用している。$F = ma$ を正確に適用するためには、まずこれらを漏れなく「ベクトル」として整理する必要がある。
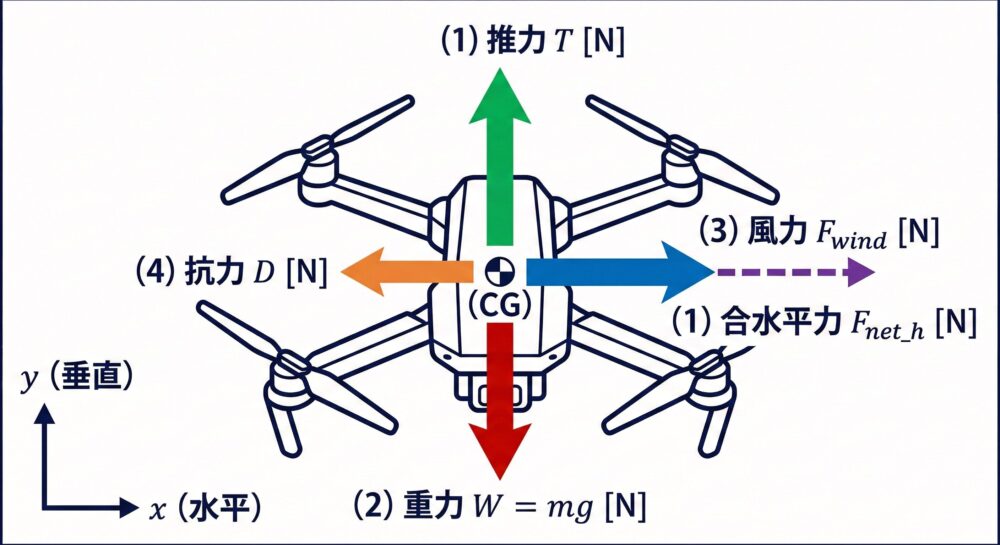
| 力の種類 | 記号 | 方向 | 計算式 | 備考 |
|---|---|---|---|---|
| 推力(Thrust) | $T$ | 上向き | $T = mg$(ホバリング時) | モーターが生み出す揚力 |
| 重力(Weight) | $W$ | 下向き | $W = mg$ | $g = 9.81\ \mathrm{m/s^2}$ |
| 風力 (Wind Force) | $F_\text{wind}$ | 横方向 | $F_\text{wind} = \frac{1}{2}\rho C_d A v^2$ | 後述で詳細計算 |
| 空気抵抗(Drag) | $D$ | 飛行と逆方向 | $D = \frac{1}{2}\rho C_d A v^2$ | 風力と同じ式の形 |
3.2 水平方向の運動方程式:横ズレを支配する式
突風による横方向の流されを分析するには、水平面の運動方程式に集中する。ホバリング中、鉛直方向は $T = W$ で釣り合っているため、純粋な横方向の加速度は次の式となる。
$$F_\text{net} = F_\text{wind} – F_\text{control} = m \cdot a_x$$
ここで $F_\text{control}$ は、フライトコントローラーが風に抵抗するために出力できる横方向の制御力である。正常動作時は $F_\text{net} \approx 0$ となるが、問題はフライトコントローラーが「反応するまでの時間遅延(レイテンシ)」だ。現代の一般的な産業用ドローンは約 50〜100 ms の制御ループ遅延を持つ。この遅延の間、機体は無抵抗で加速し続ける。
3.3 風力 $F_\text{wind}$ の正確な計算:気象データを数式に変換する
突風が機体に与える力は、流体力学の「抗力の式(Drag Equation)」で表される。
$$\boxed{F_\text{wind} = \frac{1}{2} \rho C_d A v^2}$$
| 記号 | 物理量 | 代表的な値 | 取得方法 |
|---|---|---|---|
| $\rho$ | 空気密度 | $1.225\ \mathrm{kg/m^3}$(標準大気、15℃、海抜0m) | 気象データ・高度から補正 |
| $C_d$ | 抗力係数 | 0.3〜1.0(機体形状に依存) | メーカースペック or 測定値 |
| $A$ | 投影面積(正面から見た面積) | $0.1$〜$0.5\ \mathrm{m^2}$ | 機体寸法から計算 |
| $v$ | 風速(相対風速) | 飛行計画地点の気象観測値 | 気象庁データ・現地測定 |
$v^2$ の項に注目してほしい。風速が2倍になると、機体に加わる力は4倍になる。 これが、「風速10 m/s なら大丈夫だが20 m/s は絶対ダメ」というパイロットの経験則を物理的に説明するものである。
3.4 加速度から「変位」へ:積分による流され距離の導出
加速度 $a$ (=F/m) が求まったら、時間 $t$ の経過に伴う速度と変位を計算できる。初速度をゼロ(ホバリング中に突風が当たった瞬間を $t = 0$ とする)として、等加速度運動の公式を適用する。
$$v(t) = a \cdot t$$
$$\boxed{x(t) = \frac{1}{2} a \cdot t^2}$$
この $x(t)$ こそが、審査官が求める「機体はどこまで流されるか」という問いへの直接の回答である。$t$ には「フライトコントローラーが風を検知して制御力を出力するまでの反応時間」を代入する。これが安全マージンの根拠となる。
第4節 実地計算:DID上空飛行の「突風流され距離」を完全シミュレーションする
4.1 シナリオ設定
以下は、東京都内DID地区の上空30 m でのインフラ点検飛行を想定した、実際の飛行許可申請で使用しうるシミュレーションである。
| パラメータ | 設定値 | 根拠 |
|---|---|---|
| 機体(機種想定) | 産業用クワッドロータ | ペイロード2 kg搭載の4軸機 |
| 総重量 $m$ | $5.5\ \mathrm{kg}$ | 機体4.5 kg + ペイロード1.0 kg |
| 空気密度 $\rho$ | $1.205\ \mathrm{kg/m^3}$ | 東京の夏季平均気温25℃、高度30 m |
| 抗力係数 $C_d$ | $0.8$ | 産業用クワッドの標準的な値 |
| 正面投影面積 $A$ | $0.25\ \mathrm{m^2}$ | ホイールベース670 mm機のおおよその値 |
| 突風風速 $v$ | $12\ \mathrm{m/s}$ | 気象庁の当該地区の観測値(瞬間最大風速) |
| FCレイテンシ $t$ | $0.1\ \mathrm{s}$(100 ms) | 一般的な産業用フライトコントローラー |
4.2 ステップ1:突風による風力 $F_\text{wind}$ を計算する
$$F_\text{wind} = \frac{1}{2} \times 1.205 \times 0.8 \times 0.25 \times 12^2$$
$$= \frac{1}{2} \times 1.205 \times 0.8 \times 0.25 \times 144$$
$$= \frac{1}{2} \times 34.70 \approx \boxed{17.35\ \mathrm{N}}$$
17.35 N という力は、約1.77 kgf に相当する。成人の手のひらで思いきり押した程度の力が、瞬時に機体へ横方向から加わると考えれば、その脅威を実感できるだろう。
4.3 ステップ2:横方向の加速度 $a$ を計算する
最悪ケースとして、フライトコントローラーが100 ms の反応時間の間、一切の制御力を出力できない($F_\text{control} = 0$)と仮定する。
$$a = \frac{F_\text{net}}{m} = \frac{17.35}{5.5} \approx \boxed{3.15\ \mathrm{m/s^2}}$$
3.15 m/s² という加速度は、重力加速度(9.81 m/s²)の約0.32倍である。ドローンが横方向に「重力の3分の1」の力で加速され続けるイメージだ。
4.4 ステップ3:流され距離 $x$ を計算する
フライトコントローラーが反応するまでの 0.1 秒間($t = 0.1\ \mathrm{s}$)、機体は等加速度運動をする。
$$x = \frac{1}{2} \times a \times t^2 = \frac{1}{2} \times 3.15 \times (0.1)^2 = \frac{1}{2} \times 3.15 \times 0.01 \approx \boxed{0.016\ \mathrm{m}\ (1.6\ \mathrm{cm})}$$
100 ms という短時間では、約1.6 cm の移動にとどまる。しかしここで重要なのは、突風が継続する時間 $t$ が長くなると、変位は $t^2$ に比例して急増することだ。
4.5 突風継続時間と流され距離の関係:$t^2$ の脅威
| 突風継続時間 $t$ | 計算 $\frac{1}{2} \times 3.15 \times t^2$ | 流され距離 $x$ | リスク評価 |
|---|---|---|---|
| 0.1 s(FCレイテンシ) | $\frac{1}{2} \times 3.15 \times 0.01$ | 0.016 m(1.6 cm) | FC正常時の最小流れ |
| 0.5 s | $\frac{1}{2} \times 3.15 \times 0.25$ | 0.39 m(39 cm) | 経路逸脱の始まり |
| 1.0 s | $\frac{1}{2} \times 3.15 \times 1.00$ | 1.58 m | 危険ゾーン突入の可能性 |
| 2.0 s | $\frac{1}{2} \times 3.15 \times 4.00$ | 6.30 m | 重大な制御喪失 |
| 3.0 s | $\frac{1}{2} \times 3.15 \times 9.00$ | 14.2 m | 対人事故リスク極大 |
⚠️ 重要な解釈: 突風が3秒間継続した場合、機体は14.2 m 横に流される計算となる。DID地区の飛行経路上に14.2 m の安全バッファが確保できない場合、その飛行計画は物理的に承認不可能であることが証明される。逆に言えば、安全バッファ内に収まる気象条件の上限を計算し、「最大許容風速」として申請書類に明記できる。
4.6 最大許容風速の逆算:申請書類への実装
飛行経路の安全バッファを左右それぞれ $x_\text{max} = 5\ \mathrm{m}$、突風継続時間を最大 $t = 2\ \mathrm{s}$ と仮定する。
Step A:許容加速度の逆算
$$x_\text{max} = \frac{1}{2} a , t^2 \quad\Longrightarrow\quad a_\text{max} = \frac{2 x_\text{max}}{t^2} = \frac{2 \times 5}{2^2} = 2.5\ \mathrm{m/s^2}$$
Step B:最大許容風力の計算
$$F_\text{max} = m \times a_\text{max} = 5.5 \times 2.5 = 13.75\ \mathrm{N}$$
Step C:最大許容風速の逆算
$$F_\text{wind} = \frac{1}{2}\rho C_d A v^2 \quad\Longrightarrow\quad v_\text{max} = \sqrt{\frac{2 F_\text{max}}{\rho C_d A}}$$
$$v_\text{max} = \sqrt{\frac{2 \times 13.75}{1.205 \times 0.8 \times 0.25}} = \sqrt{\frac{27.5}{0.241}} = \sqrt{114.1} \approx \boxed{10.7\ \mathrm{m/s}}$$
✅ 申請書類への実装例:
「本飛行計画において、安全バッファ5 m・突風継続最大2秒を条件とした場合、$F = ma$ の運動方程式および流体力学的抗力の式より、最大許容瞬間風速を 10.7 m/s と算定する。気象庁の当該地区過去5年間の瞬間最大風速データ(別添)と照合の結果、本飛行日の気象条件はこの条件を満たすことを確認した。」
4.7 風速 $v$ とリスクの非線形性:$v^2$ が示す「臨界点」
飛行計画の「風速〇m/s以下」という条件設定が、なぜその値でなければならないかを示す。
| 風速 $v$ (m/s) | 風力 $F_\text{wind}$ (N) | 加速度 $a$ (m/s²) | 1秒後の流れ $x$ (m) |
|---|---|---|---|
| 5 | 3.01 | 0.55 | 0.27 |
| 8 | 7.71 | 1.40 | 0.70 |
| 10 | 12.05 | 2.19 | 1.10 |
| 12(本計算) | 17.35 | 3.15 | 1.58 |
| 15 | 27.11 | 4.93 | 2.46 |
| 20 | 48.20 | 8.76 | 4.38 |
風速が5 m/s から10 m/s に倍増すると、流され距離は約4倍(0.27 m → 1.10 m)となる。さらに20 m/s では1秒で4.38 m 流される。「風速が2倍になったら、リスクは4倍」 という法則を申請書に明記することで、運航上限の根拠が揺るぎないものになる。
まとめ:F = ma は「リスクの定量化装置」である
本稿では、ニュートンの運動方程式 $F = ma$ を出発点として、突風時の機体流され距離を完全にシミュレーションする手法を解説した。重要なポイントを整理する。
- 風力は $v^2$ に比例する: 風速が2倍になると、機体に加わる力は4倍になる。この非線形性を無視した安全評価は根拠として成立しない。
- 加速度から変位へ: $F = ma \to a = F/m \to x = \frac{1}{2}at^2$ という連鎖計算により、気象データを「機体の移動距離」に翻訳できる。
- 逆算による最大許容風速の設定: 安全バッファと突風継続時間から逆算することで、申請書類に記載すべき「運航上限風速」を科学的に導出できる。
- FC遅延を含む最悪ケース計算: フライトコントローラーの反応遅延(レイテンシ)を計算に組み込むことで、「最悪事態を想定した上で安全だ」と審査官に証明できる。
次回(第6回)では、機体フレームのたわみと共振の問題を扱う「剛体の力学」に踏み込む。複数のモーターが高速で回転する機体において、フレームの微細な変形が引き起こす周波数共振は、ある条件下で機体を空中分解させる危険な現象だ。$F = ma$ で「動きを計算する」力を身につけた今こそ、「材料の強度と振動」という次の壁に挑む準備が整った。

コメント