

1. 「大型機なら安定しているはず」——その思い込みが、申請を殺す
ある橋梁点検事業者が、全備重量25 kgの大型ヘキサコプターでカテゴリーIII飛行の許可申請を提出した。機体は高価で堅牢、モーターも高出力。事業者は自信満々だったという。
しかし、審査官から返ってきたのは一枚の補正指示書だった。
「貴社の機体は全備重量25 kgですが、突風時に姿勢補正が完了するまでの応答時間を定量的にお示しください。特に、同等推力の小型機(全備重量5 kg級)と比較して、制御応答性がどの程度低下するかを数値で示した上で、安全性を証明してください。」
事業者は絶句した。「大きいほうが安定する」「重いから風に流されにくい」——そう信じていたからだ。
結論から言えば、この直感は半分正しく、半分致命的に間違っている。
確かに、重い機体は並進運動(直線的に流される動き)に対しては慣性が大きく、風に押されにくい。第4回(慣性の法則)で解説した通りだ。しかし回転運動——すなわちピッチ(前後傾斜)、ロール(左右傾斜)、ヨー(水平回転)に対する「回りにくさ」は、単なる質量では決まらない。
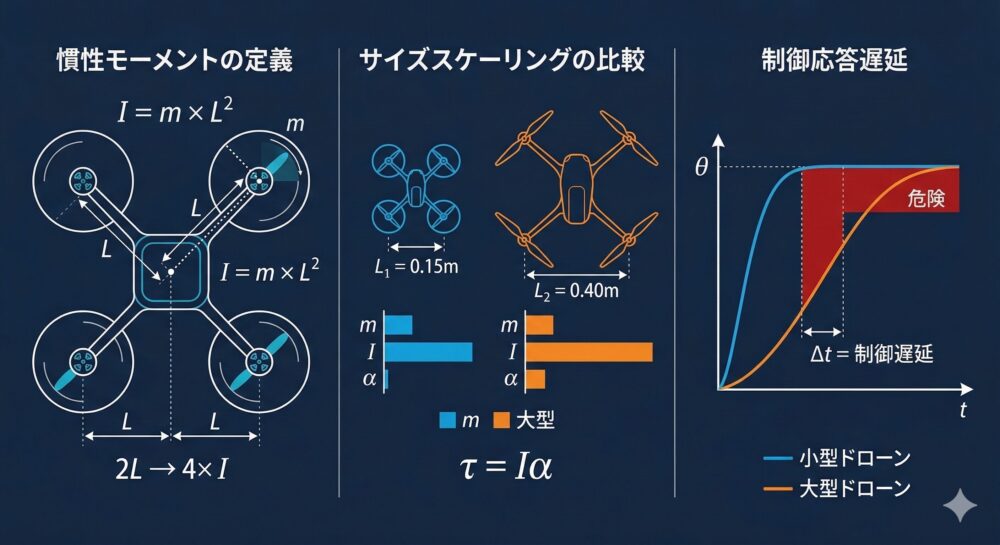
回転に対する慣性は、慣性モーメント(Moment of Inertia) $I$ という、質量とは全く異なる物理量で記述される。そしてこの $I$ は、質量に比例するだけでなく、回転軸からの距離の二乗に比例して爆発的に増大する。
これが意味することは深刻だ。機体のアームが長い大型機は、同じ質量の小型機と比較して、慣性モーメントが桁違いに大きくなる。慣性モーメントが大きいということは、モーターの推力変化(トルク入力)に対する姿勢変化の応答が遅い——すなわち制御遅延が増大するということだ。
大型機で突風に遭遇したとき、フライトコントローラーが「10度左に傾け」と指令を出しても、小型機なら0.05秒で完了する姿勢変更に、大型機は0.2秒以上を要する場合がある。この0.15秒の差が、DID地区の飛行においては建物への衝突リスクとなり、橋梁点検においては構造物との接触事故を生む。
審査官が大型機に対して制御応答性の証明を求める理由は、まさにこの物理にある。そして「なんとなく大きいから安定」という定性的な主張は、慣性モーメントの概念を持たない者の自殺行為に等しいのだ。
2. 【武器の提示】慣性モーメント $I$ ——回転の「重さ」を数値化する物理量
並進運動における「動かしにくさ」を表す物理量が質量 $m$ であるのと同様に、回転運動における「回しにくさ」を表す物理量が慣性モーメント $I$(単位:$\mathrm{kg \cdot m^2}$)である。
ニュートンの運動方程式(第5回)が並進運動を支配するのと完全に対応する形で、回転運動は以下の方程式に支配される。
$$\tau = I \cdot \alpha$$
- $\tau$(タウ):トルク [N·m](回転を引き起こす力のモーメント。第2回で解説済み)
- $I$:慣性モーメント [$\mathrm{kg \cdot m^2}$]
- $\alpha$(アルファ):角加速度 [rad/s²](第1回で導入した角速度 $\omega$ の時間変化率)
この式を変形すれば、あるトルク $\tau$ を加えたときに得られる角加速度 $\alpha$ が算出できる。
$$\alpha = \frac{\tau}{I}$$
ここから直ちに分かること——同じトルクを与えても、$I$ が大きい機体ほど角加速度 $\alpha$ は小さくなる。すなわち、姿勢変更が遅くなる。
この式こそが、「大型機はなぜ鈍感なのか」という問いに対する完全な回答であり、審査官に対して制御遅延を定量的に示すための核心的なツールだ。
3. 慣性モーメントの定義と、「距離の二乗」が支配する法則
3-1. 慣性モーメントの数学的定義
慣性モーメント $I$ は、回転軸からの距離 $r_i$ の位置にある質量要素 $m_i$ の寄与を、すべて合算したものとして定義される。
$$I = \sum_{i} m_i \cdot r_i^2$$
連続体(一様な物体)の場合は積分形で記述される。
$$I = \int r^2 dm$$
この定義の核心は「$r^2$(距離の二乗)」の項にある。質量が回転軸から2倍遠い位置にあれば、慣性モーメントへの寄与は4倍になる。3倍遠ければ9倍だ。
ドローンに置き換えれば、モーターとプロペラが機体中心(重心)から遠い位置に取り付けられているほど、慣性モーメントは爆発的に増大する。アーム長が倍になれば、そのモーターの慣性モーメントへの寄与は4倍になるということだ。
3-2. ドローン機体の慣性モーメントを「部品の足し算」で理解する
実際のドローン機体の慣性モーメントは、各構成部品の寄与を合算することで近似的に算出できる。ここでは重心を通る水平軸(ロール軸またはピッチ軸)まわりの慣性モーメントを考える。
マルチコプターの場合、慣性モーメントへの主要な寄与因子は以下の通りだ。
① モーター+プロペラ(最大の寄与因子)
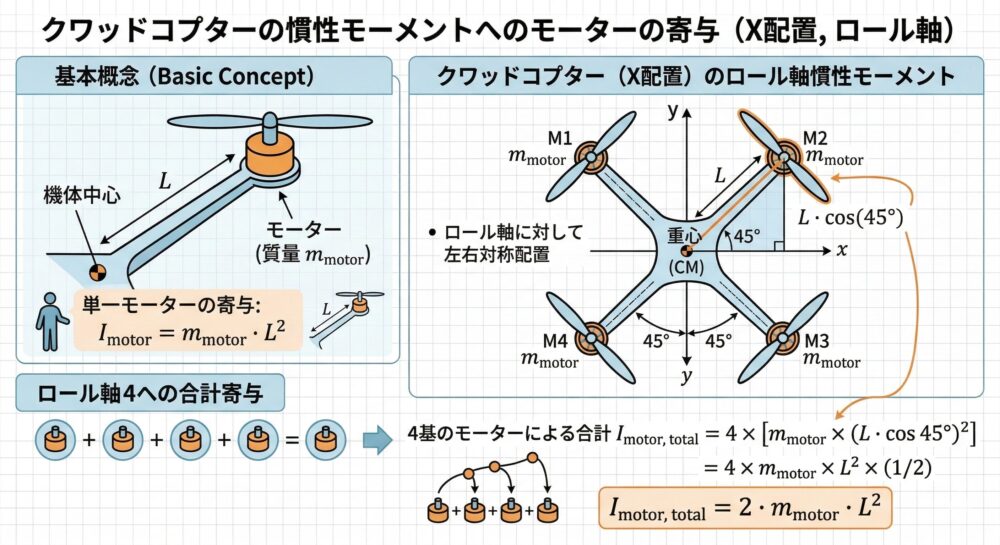
各モーターとプロペラは、機体中心からアーム長 $L$ だけ離れた位置にある。質量 $m_{\text{motor}}$ のモーターが距離 $L$ にある場合、その慣性モーメントへの寄与は:
$$I_{\text{motor}} = m_{\text{motor}} \cdot L^2$$
クワッドコプターの場合、ロール軸まわりには左右各2基のモーターが対称配置されるため(X配置の場合は $L \cdot \cos 45°$ の補正が入る)、この項が複数個加算される。
② 中央ボディ(バッテリー・フライトコントローラー等)
機体中央部に集中する質量は、回転軸からの距離が小さいため、慣性モーメントへの寄与は相対的に小さい。直方体近似で:
$$I_{\text{body}} = \frac{1}{12} m_{\text{body}} (w^2 + h^2)$$
($w$:幅、$h$:高さ)
③ アーム
アームは回転軸から外側に延びる棒状の質量分布だ。片側のアーム(長さ $L$、質量 $m_{\text{arm}}$)の慣性モーメントは:
$$I_{\text{arm}} = \frac{1}{3} m_{\text{arm}} \cdot L^2$$
3-3. 「距離の二乗」が生み出す実務的インパクト
以上の式群から、決定的に重要な洞察が得られる。
機体サイズをスケールアップすると、アーム長 $L$ が増大する。質量 $m$ は概ね $L$ の3乗(体積比)で増大するが、慣性モーメント $I$ は $m \times L^2$ に比例するため、結果的に$L$ の5乗のオーダーで増大する(正確なスケーリングは設計により異なるが、傾向は明確だ)。
つまり機体サイズを2倍にすると、質量は約8倍、慣性モーメントは約32倍になりうる。モーターのトルクも増大するが、トルクは概ね $L$ の3〜4乗程度でしかスケールしない。結果として、大型機ほど「トルク対慣性モーメント比」が悪化し、角加速度が低下する——これが大型機の制御応答が鈍化する根本的な物理メカニズムだ。
4. 【実務計算】機体サイズによる制御応答性の差を、数値で証明する
ケーススタディ:5 kg級小型機 vs. 25 kg級大型機の姿勢応答比較
審査官に「大型機でも安全に運用できる」ことを証明するため、2つの機体の慣性モーメントと角加速度を算出し、制御応答時間を比較する。
【機体A:小型クワッドコプター(5 kg級)】
| パラメータ | 値 |
|---|---|
| 全備重量 | 5.0 kg |
| アーム長(中心〜モーター) | $L = 0.18$ m |
| モーター+プロペラ質量(1基) | $m_{\text{motor}} = 0.12$ kg |
| 中央ボディ質量 | $m_{\text{body}} = 3.5$ kg(バッテリー・FC等含む) |
| アーム質量(1本) | $m_{\text{arm}} = 0.08$ kg |
| ボディ寸法(幅×高さ) | $w = 0.15$ m、$h = 0.10$ m |
ロール軸まわりの慣性モーメント(X配置クワッド):
X配置の場合、ロール軸に対して各モーターの距離は $L \cdot \sin 45° = L / \sqrt{2}$ となる。
$$I_{\text{motors}} = 4 \times m_{\text{motor}} \times \left(\frac{L}{\sqrt{2}}\right)^2 = 4 \times 0.12 \times \left(\frac{0.18}{\sqrt{2}}\right)^2$$
$$= 4 \times 0.12 \times (0.1273)^2 = 4 \times 0.12 \times 0.01620$$
$$= 0.00778 ; \mathrm{kg \cdot m^2}$$
$$I_{\text{body}} = \frac{1}{12} \times 3.5 \times (0.15^2 + 0.10^2) = \frac{1}{12} \times 3.5 \times 0.0325 = 0.00948 ; \mathrm{kg \cdot m^2}$$
$$I_{\text{arms}} = 4 \times \frac{1}{3} \times 0.08 \times 0.18^2 \times \sin^2 45° = 4 \times \frac{1}{3} \times 0.08 \times 0.0324 \times 0.5 = 0.00173 ; \mathrm{kg \cdot m^2}$$
$$I_A = I_{\text{motors}} + I_{\text{body}} + I_{\text{arms}} = 0.00778 + 0.00948 + 0.00173 \approx 0.0190 ; \mathrm{kg \cdot m^2}$$
【機体B:大型ヘキサコプター(25 kg級)】
| パラメータ | 値 |
|---|---|
| 全備重量 | 25.0 kg |
| アーム長(中心〜モーター) | $L = 0.50$ m |
| モーター+プロペラ質量(1基) | $m_{\text{motor}} = 0.45$ kg |
| 中央ボディ質量 | $m_{\text{body}} = 15.0$ kg |
| アーム質量(1本) | $m_{\text{arm}} = 0.35$ kg |
| ボディ寸法(幅×高さ) | $w = 0.35$ m、$h = 0.20$ m |
ロール軸まわりの慣性モーメント(ヘキサ配置):
ヘキサコプター(60°間隔配置)では、各モーターのロール軸に対する距離は $L \cdot \sin \theta_i$($\theta_i$ はモーター配置角)となる。6基のモーターについて $\sin^2 \theta_i$ を合算すると、対称配置では $\sum \sin^2 \theta_i = 3$ となる。
$$I_{\text{motors}} = m_{\text{motor}} \times L^2 \times \sum \sin^2 \theta_i = 0.45 \times 0.50^2 \times 3 = 0.45 \times 0.25 \times 3 = 0.3375 ; \mathrm{kg \cdot m^2}$$
$$I_{\text{body}} = \frac{1}{12} \times 15.0 \times (0.35^2 + 0.20^2) = \frac{1}{12} \times 15.0 \times 0.1625 = 0.2031 ; \mathrm{kg \cdot m^2}$$
$$I_{\text{arms}} = 6 \times \frac{1}{3} \times 0.35 \times 0.50^2 \times \frac{3}{6} = 6 \times \frac{1}{3} \times 0.35 \times 0.25 \times 0.5 = 0.0875 ; \mathrm{kg \cdot m^2}$$
$$I_B = 0.3375 + 0.2031 + 0.0875 \approx 0.628 ; \mathrm{kg \cdot m^2}$$
【比較:同一トルク入力に対する角加速度の差】
ここで仮に、両機体が突風による姿勢乱れを補正するために、ロール軸まわりに $\tau = 2.0$ N·m のトルクを発生させたとする。
$$\alpha_A = \frac{\tau}{I_A} = \frac{2.0}{0.0190} \approx 105.3 ; \mathrm{rad/s^2}$$
$$\alpha_B = \frac{\tau}{I_B} = \frac{2.0}{0.628} \approx 3.18 ; \mathrm{rad/s^2}$$
機体Aの角加速度は機体Bの約33倍だ。
これが意味する実務的な差は劇的だ。目標姿勢角を $\theta = 5°$($\approx 0.0873$ rad)に設定し、等角加速度運動と仮定した場合の所要時間 $t$ は:
$$\theta = \frac{1}{2} \alpha t^2 \quad \Rightarrow \quad t = \sqrt{\frac{2\theta}{\alpha}}$$
$$t_A = \sqrt{\frac{2 \times 0.0873}{105.3}} = \sqrt{0.001658} \approx 0.041 ; \text{s} \quad (\approx 41 ; \text{ms})$$
$$t_B = \sqrt{\frac{2 \times 0.0873}{3.18}} = \sqrt{0.05491} \approx 0.234 ; \text{s} \quad (\approx 234 ; \text{ms})$$
小型機は約41ミリ秒で5度の姿勢補正を完了するのに対し、大型機は約234ミリ秒を要する。
この約200ミリ秒(0.2秒)の差は、秒速10 m/sの突風環境下では、大型機が補正完了までの間に追加で約2 mの横方向変位を許容することを意味する(第5回の $F = ma$ による変位計算と連動する)。建物から5 m離れた位置での橋梁点検においては、この2 mのマージン消費が安全距離の40%を食いつぶすことを意味するのだ。
安全マージンの設定と申請書への実装
上記の計算結果を、審査官が求める「制御応答性の定量評価」として以下のようにまとめる。
| 評価項目 | 機体A(5 kg小型) | 機体B(25 kg大型) | 安全基準 |
|---|---|---|---|
| ロール軸慣性モーメント $I$ | 0.0190 kg·m² | 0.628 kg·m² | — |
| 角加速度($\tau = 2.0$ N·m時) | 105.3 rad/s² | 3.18 rad/s² | — |
| 5°姿勢補正所要時間 | 41 ms | 234 ms | FC制御周期(通常250〜500 Hz)の範囲内であること |
| 補正遅延中の最大横方向変位(10 m/s突風時) | 約 0.2 m | 約 2.0 m | 飛行経路と障害物の離隔距離の20%以下 |
大型機を安全に運用するために必要な措置として、申請書に以下を明記する。
第一に、大型機のトルク出力は小型機の2.0 N·mでは不十分であり、実機の最大制御トルク $\tau_{\text{max}}$ を用いて再計算する。大型機のモーターが1基あたり30 Nの推力差分を発生でき、アーム長0.50 mの場合:
$$\tau_{\text{max}} = \Delta T \times L \times n_{\text{effective}} = 30 \times 0.50 \times 2 = 30.0 ; \text{N·m}$$
(ヘキサコプターのロール制御では実効的に2基分の推力差が使える場合の概算)
このとき角加速度は:
$$\alpha_B’ = \frac{30.0}{0.628} \approx 47.8 ; \mathrm{rad/s^2}$$
5°補正所要時間は:
$$t_B’ = \sqrt{\frac{2 \times 0.0873}{47.8}} \approx 0.060 ; \text{s} \quad (\approx 60 ; \text{ms})$$
実機の最大トルクを用いれば、5度の姿勢補正は約60ミリ秒で完了する。これはフライトコントローラーの制御周期(250 Hz = 4 ms周期)に対して十分な応答性であり、「制御可能」であることの物理的証明となる。
第二に、安全係数として慣性モーメントの計算値に1.2〜1.5の余裕率を乗じ、ケーブル類やコネクタなど計算に含めていない質量分の影響を吸収する。
$$I_{B,\text{design}} = I_B \times 1.3 = 0.628 \times 1.3 = 0.816 ; \mathrm{kg \cdot m^2}$$
この安全係数込みの値で再計算した応答時間を申請書に記載することで、「最悪条件でも制御可能である」という証明が完成する。
次回への接続
本稿では慣性モーメントの基礎概念と、機体サイズによる制御応答性の差を定量化する手法を解説した。しかし実務では、慣性モーメントの問題は「機体のサイズ」だけに留まらない。
第9回(慣性モーメント・応用編)では、ジンバルカメラ、測量用LiDAR、農薬タンクなど、可動するペイロードの搭載が慣性モーメントを動的に変化させる問題を扱う。ペイロードの「位置」が飛行中に変わるということは、慣性モーメント $I$ がリアルタイムで変動するということだ。これが引き起こす制御不安定性と、その対策としてのペイロード配置最適化——第7回(重心計算)で扱った液揺れ・荷揺れ問題と直結する発展的テーマを、工学的に掘り下げる。
さらに、慣性モーメントは第10回(角運動量)および第11回(角運動量保存の法則)の数学的基盤でもある。$L = I \omega$(角運動量 = 慣性モーメント × 角速度)という関係は、モーター1発停止時のヨー暴走リスクの定量評価に直結する。本稿で算出した $I$ の値は、そのままこれらの計算に入力される「基本パラメータ」となることを、ここに予告しておく。

コメント