

1. 「通信が切れないよう監視する」という素人の弁明が招く不許可の烙印
「高性能なアンテナを使用し、電波状況を常にモニターします。もし通信が切れたら、すぐに補助者が走って機体を探しに行きます」
目視外飛行(BVLOS:Beyond Visual Line of Sight)の許可申請において、このような「努力目標」を審査官に提示してしまう事業者が後を絶たない。彼らは「電波が切れないための対策」を一生懸命にアピールするが、審査官が本当に知りたいのは「切れた後、その機体がどうなるのか」という冷徹な事実である。
目視外飛行とは、文字通り操縦者の直接的な視覚から機体が完全に切り離された状態を指す。この状態で、機体との唯一の繋がりであるC2リンク(コマンド・アンド・コントロールリンク:通信用電波)が遮断された瞬間、ドローンは操縦者の意志を離れた「制御不能な質量」と化す。
このとき「人が探しに行く」などという悠長なヒューマン・レスポンスは、行政法学が求める「安全確保措置」としては一切機能しない。人間の足が機体に追いつく前に、ドローンは風に流されて第三者の家屋や道路に激突するからだ。
航空法において目視外飛行の許可(第132条の86第2項第2号等による禁止の解除)を得るためには、通信途絶という「異常事態」に対する相当な安全確保措置が必須となる。通信が切れることを「起きないようにする」のではなく、「切れたとしても、絶対に他者に危害を加えない」ことをシステム的に保証できなければ、永遠に目視外飛行の許可証(ライセンス)を手に入れることはできないのである。
2. 審査要領が求める「危機回避機能(フェールセーフ)」の法的強制力
この「通信途絶の恐怖」を抱く審査官の裁量(不許可にする権限)を論理的に完封するための武器。それは、国土交通省の「審査要領 5-4(目視外飛行)」に明記された要件と、国が定めるリスク評価ガイドラインを掛け合わせた「自律的システムの物理的証明」である。
審査要領は、目視外飛行の絶対条件として「不具合発生時に危機回避機能(フェールセーフ機能)が正常に作動すること」を求めている。そして、電波断絶の場合には「離陸地点まで自動的に戻る機能(自動帰還機能)又は電波が復帰するまで空中で位置を維持する機能」を有していなければならないと明言している。
さらに、SORA(Specific Operations Risk Assessment)に準拠した国のリスク評価ガイドラインにおいては、「OSO#06(C3リンクの特性が運航に適していること)」として、通信リンクの可用性や継続性の証明が求められている。
すなわち、我々が申請書に記述すべきは、「人間がどう注意深く対応するか」ではない。「通信が途絶したコンマ数秒後に、機体のフライトコントローラーが自律的にどのようなアルゴリズムを起動し、絶対座標上のどの経路を辿って安全圏へ帰還・着陸するのか」という、反論不可能な「システムの設計図(フェールセーフの工学的保証)」なのである。
3. 「自動帰還(RTH)」に潜む幾何学的リスクと、自律システムの完全統制
目視外飛行において、機体と地上システムを結ぶC2リンク(コマンド・アンド・コントロールリンク)は単なる通信電波ではなく、法学上における「機体を制御下に置いていることの唯一の証明」である。これが途絶した状態を「ロストリンク」と呼び、この瞬間に機体は「航空法上の操縦」から外れ、完全な自律システム(フェールセーフ)へと移行する。
多くの事業者は、マニュアルに「通信途絶時にはフェールセーフ機能(自動帰還)により離陸地点へ戻るため安全である」とだけ書き、審査官から突き返される。彼らは、フェールセーフに潜む「幾何学的な致命傷」を理解していないのだ。
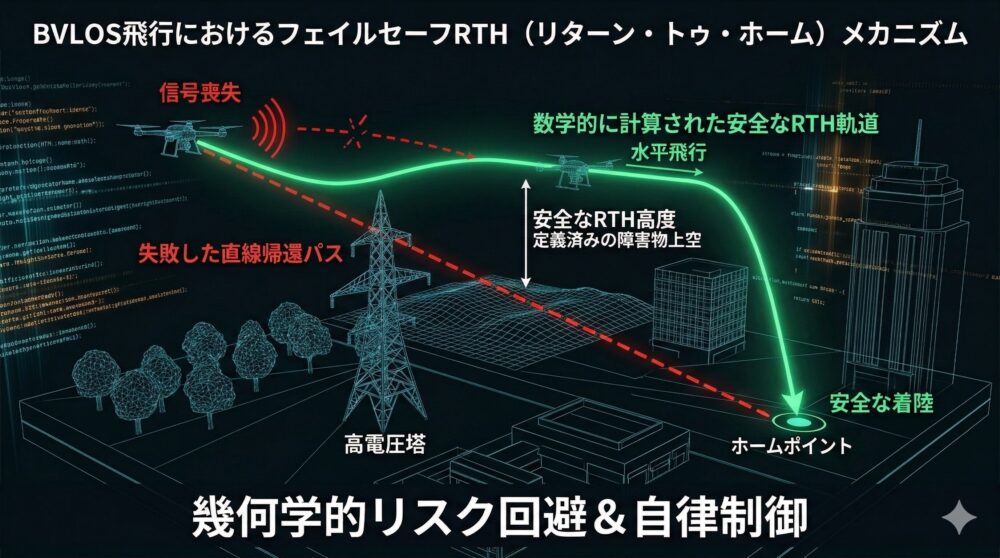
一般的なドローンの自動帰還(RTH:Return to Home)機能は、通信が途絶した現在地からホームポイント(離陸地点)に向けて「最短距離(直線)」で飛行しようとする。もしその直線経路上に、プラントの煙突や建設中のクレーン、あるいは高圧電線が存在していたらどうなるか。機体は障害物に一直線に激突し、最悪の場合は第三者の頭上に墜落する。
審査要領5-4が「不具合発生時の危機回避機能が正常に作動すること」を要求し、さらに国のリスク評価ガイドライン(OSO#06)が「C2リンク喪失のトリガー条件とリカバリープロセス」の証明を求めているのは、「機体が自律的にどのような三次元軌道を描いて帰還するか」を数学的に証明せよ、ということである。
この幾何学的リスクを排除し、審査官を論破するためのメカニズムは以下の3点で構成される。
1. ロストリンクからフェールセーフ発動までの「時間的定義(トリガー条件)」 通信が切れてから機体がフェールセーフに移行するまでの「閾値」を明確にする。例えば、「C2リンクの途絶状態が11秒継続した場合、機体は自動帰還モードに移行する」といったフライトコントローラーのシステム仕様(ロジック)を提示する。
2. 絶対安全高度(RTH高度)の工学的設定 直線帰還による激突を防ぐため、フェールセーフ発動時の「帰還高度」を物理的に設定する。飛行エリア内に存在する最も高い障害物(例:高度80mの鉄塔)を事前測量で特定し、それ以上の高度(例:100m)を「RTH高度」としてシステムに強制入力する。 これにより、通信途絶時の機体は「現在地から直進する」のではなく、「まず障害物のない100mの空間まで垂直に上昇し、そこからホームポイント上空まで安全な高度を保って直線飛行し、最後に垂直降下する」という完璧な三次元回避軌道を描くことになる。
3. 障害物回避アルゴリズムの提示 さらに高度な機体においては、「機体は元の飛行ルート上を50m後退するように飛行し、その後RTH高度まで上昇して直線帰還を開始する」といった、より複雑な衝突回避アルゴリズムが組み込まれている場合がある。 これら機械の「自律的な振る舞い」を事前に完全にプロファイリングし、それをマニュアルの前提条件として組み込むのである。
人間の手が及ばない自律制御の時間帯だからこそ、その「機械の振る舞い」を事前に完全に予測し、空間座標の枠内に封じ込める。これこそが、目視外飛行におけるフェールセーフの真の法的・工学的証明である。
4. 【実務への落とし込み】 DIPS2.0申請書類への「フェールセーフ・ロジック」の実装と立証
目視外飛行の許可・承認申請において、審査官は航空局審査要領5-4(1)c)の「不具合発生時に危機回避機能が正常に作動すること」という要件を厳格に審査する。 ここで、事業者は申請書の「無人航空機の追加基準への適合性(別添資料2)」や独自マニュアルに、「電波断絶時には自動帰還機能が作動し、安全に戻ってきます」とだけ書いて提出し、補正指示の餌食となる。
審査官が求めているのは「機能の名前」ではない。「その機能が、指定された絶対座標空間のなかで、どのような三次元軌道を描いて作動するのか」という物理的・工学的な証明(エビデンス)である。
以下の3ステップで、審査官の反論を封殺する「フェールセーフの立証」を構築する。
1. トリガー条件と自律的アルゴリズムの明文化
まず、マニュアルの「異常事態時の対応」の項目において、人間の主観的判断を排除し、システムが自律行動へ移行する「トリガー」と「アルゴリズム」を仕様書レベルで記述する。
【マニュアル記載例】 「通信途絶(ロストリンク)時における危機回避機能として、C2リンクの途絶状態が11秒間継続した場合(トリガー条件)、機体のフライトコントローラーは自律的にフェールセーフRTH(Return to Home)モードへ移行する。機体は直ちに元の飛行ルート上を50m後退するように飛行し、その後、次項で設定する安全高度まで上昇を開始する。」
2. RTH高度の幾何学的設定と「空中リスクの完封」
次に、直線帰還による障害物への激突リスク(幾何学的リスク)を排除していることを、事前測量の結果とともに提示する。
【マニュアル記載例】 「自動帰還時の直線ルート上における障害物への衝突リスクを完全に排除するため、飛行前の現地調査により、飛行エリアおよび帰還ルート周辺の最高障害物(例:高さ80mの鉄塔)を特定している。これに基づき、機体のRTH高度(帰還高度)をシステム上で『100m』に強制設定する。通信途絶時、機体は現在位置から高度100mまで垂直上昇したのち、設定されたホームポイント上空まで水平移動し、垂直に着陸する軌道を描くため、幾何学的に障害物と交差することはあり得ない。」
3. 圧倒的エビデンス(テストログ)の添付
そして最後に、これらが「単なる机上の空論」ではないことを証明するため、DIPS2.0の「その他添付資料」として、絶対的な物理的証拠を突きつける。
- メーカーの仕様書: 機体が上述のフェールセーフ・アルゴリズムを備えていることを示すメーカー発行のユーザマニュアルの該当部分。
- 事前飛行テストのログデータ: 安全な環境で意図的に送信機の電源を切り(C2リンクを遮断し)、機体が設定したRTH高度(100m)まで上昇して正確に帰還したことを示す、実際の「フライトログデータ(高度と軌跡の3Dグラフ等)」の抽出記録。
審査官の「NO」を物理的に破壊する
国のリスク評価ガイドライン(SORA準拠)において、運航手順やフェールセーフの妥当性は「専用の飛行試験、またはシミュレーションを通じて証明されること」が求められている。 「気をつけて監視します」という人間の不確実な注意力を捨て、「トリガー時間」「設定高度」「三次元軌道」という数学的パラメータと、「フライトログ」という物理的エビデンスで申請書を組み上げたとき、あなたの書類は無敵のセーフティ・ケースとなる。
目視外飛行という「見えない空間」を制する者は、電波の監視に長けた者ではない。通信が切れた後の「機械の自律的な振る舞い」を事前に完全に設計し、数学と物理学をもって審査官を沈黙させる者だけなのである。

コメント