

1.審査官の最初の壁——「そのモーター、制御できていると言い切れますか?」
ある日の午後、あなたはカテゴリーIII飛行の許可申請書を航空局に提出した。機体スペックシートには、メーカーカタログから転記した「モーター回転数:8,000 RPM」の文字が並んでいる。
翌週、審査担当官からの電話が鳴る。
「御社の機体、カタログには『8,000RPM』とありますが、このモーターが突風を受けた瞬間に回転数をどう変化させ、姿勢制御にどれだけの時間で反映されるのか——その定量的な説明は、申請書のどこに記載されていますか?」
沈黙が3秒続いた時点で、あなたの申請は実質的に暗礁に乗り上げたも同然だ。
この場面は、決して架空のシナリオではない。DID地区(人口集中地区)上空飛行や第三者上空飛行の許可審査において、「モーターの速さ」をRPMという数字の大小でしか語れない事業者は、審査官の最初の技術的な問いで詰まる。「回転数が高いので安定しています」「十分な推力があります」——こうした定性的な説明は、法的な安全証明として一切機能しない。
問題の本質はこうだ。RPM(Revolutions Per Minute:毎分回転数)は、人間にとっては直感的に「速い・遅い」が分かりやすい単位だが、物理学の方程式にそのまま代入できる形になっていない。トルクの計算にも、角運動量の計算にも、制御応答性の評価にも使えない。つまり、RPMのままでは計算書が書けないのだ。
計算書が書けなければ、安全の「証明」はできない。証明ができなければ、許可は下りない。
この壁を突破する鍵となるのが、回転運動を物理学の言語に翻訳する最も基本的な概念——ラジアン(rad)と角速度 ω(オメガ)である。
身近な例で言えば、こういうことだ。料理のレシピに「塩を適量」と書いてあっても、プロの厨房では通用しない。「塩化ナトリウム 3.0 g」と書いて初めて、誰が調理しても同じ結果が再現される。RPMが「適量」なら、角速度 $\omega$ [rad/s] は「3.0 g」に相当する——物理方程式という「レシピ」に直接投入できる、厳密な計量値だ。
本シリーズ全60回の最初の一歩は、ここから始まる。
2.【武器の提示】RPMを $\omega$ に変換する——たった一行の式が、申請書の格を変える
ドローンのモーター性能はメーカーカタログ上、すべてRPMで表記される。しかしこの単位は、トルク(第2回)、慣性モーメント(第8回・第9回)、角運動量(第10回・第11回)といった力学計算に直接接続できない。
工学と物理学の世界が回転運動を記述するために使う統一言語、それが角速度 $\omega$(オメガ)だ。単位は [rad/s](ラジアン毎秒)である。
今回の武器:RPM → 角速度 $\omega$ 変換式
$$\omega = \frac{2\pi n}{60} \quad \text{[rad/s]}$$
変数リファレンス
| 記号 | 名称 | 単位 | 意味 |
|---|---|---|---|
| $\omega$ | 角速度(オメガ) | rad/s | 1秒あたりに回転する角度(ラジアン単位) |
| $n$ | モーター回転数 | RPM | 1分あたりの回転数(メーカーカタログ値) |
| $2\pi$ | 円一周の角度 | rad | 1回転 = $2\pi \approx 6.283$ ラジアン |
| $60$ | 単位変換係数 | s/min | 1分 = 60秒 |
この一行の変換式を申請書に明記し、そこからトルクや慣性モーメントの計算へと繋いでいく——その一連の流れ自体が、「この事業者は機体の回転挙動を物理的に把握している」という審査官への強力なシグナルとなる。
3.ラジアンとは何か、角速度とは何か
3-1. ラジアン(rad)——角度を「工学の共通言語」にする単位
日常生活では角度を「度(°)」で測る。直角は90°、一回転は360°。人間の感覚にはこれで十分だが、物理方程式の中に「360°」や「90°」が混在すると、あらゆる場所に変換係数 $\pi/180$ が必要になる。これは計算ミスの温床であり、工学上のリスクだ。
ラジアンは、この問題を根本から解消する角度の単位である。定義はシンプルだ。
$$\theta \text{[rad]} = \frac{s}{r}$$
ここで $s$ は弧の長さ、$r$ は円の半径である。
たとえばピザを思い浮かべてほしい。半径20 cmのピザの外周に沿って、ちょうど20 cm分の弧を取ったとき——その中心角がぴったり「1ラジアン」だ。弧の長さと半径が等しくなる角度、それが1 radの定義である。度数に直せば約57.3°となる。
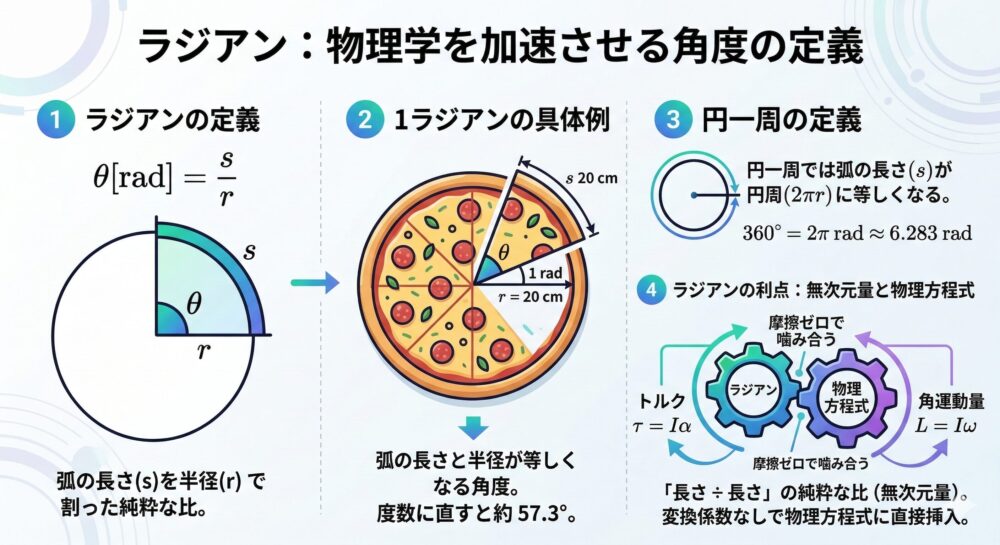
円一周では弧の長さが円周 $2\pi r$ に等しくなるから、一周は $2\pi$ ラジアンとなる。
$$360° = 2\pi \approx 6.283 ;\text{rad}$$
この定義のおかげで、ラジアンは「長さ ÷ 長さ」という純粋な比(無次元量)になる。だからこそ、トルク $\tau = I \alpha$ の式にも、角運動量 $L = I\omega$ の式にも、変換係数なしで直接挿入できる。物理方程式にとって、ラジアンは「摩擦ゼロ」で噛み合う歯車のようなものだ。
3-2. 角速度 $\omega$——「どれだけ速く回っているか」を力学の言語で表す
角速度 $\omega$ は、単位時間あたりに回転する角度の変化量として定義される。
$$\omega = \frac{d\theta}{dt} \quad \text{[rad/s]}$$
言い換えれば、「1秒間にプロペラが何ラジアン分回転したか」を表す量だ。
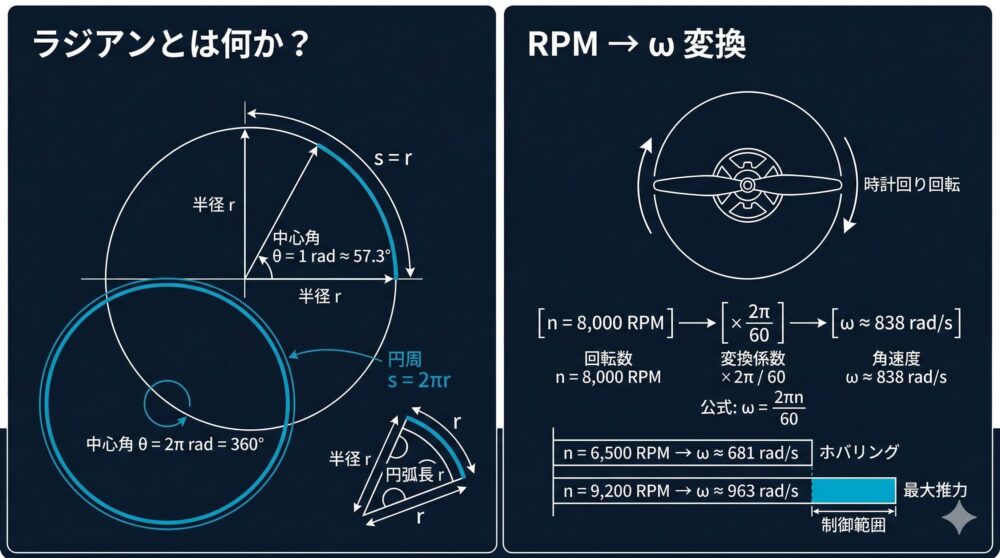
モーターの回転数 $n$ [RPM] は「1分間に $n$ 回転する」ことを意味する。1回転は $2\pi$ ラジアン、1分は60秒であるから、RPMから $\omega$ への変換式は自然に導かれる。
$$\omega = \frac{2\pi n}{60} \quad \text{[rad/s]}$$
日常的な感覚では、RPMの方が「何回転しているか」が分かりやすい。しかし物理の世界では、角速度 $\omega$ でなければ話が始まらない。自動車のスピードメーターが km/h で表示されていても、カーナビの内部計算は m/s で処理しているのと同じ構造だ。RPMは人間向けの「表示単位」、$\omega$ [rad/s] は物理方程式向けの「計算単位」——この使い分けを意識するだけで、申請書の精度は一段上がる。
3-3. なぜ $\omega$ が「全60回の起点」なのか
本シリーズでは、第2回でトルク $\tau = I\alpha$(重量級ペイロードの持ち上げ能力)、第8回〜第9回で慣性モーメント $I$(機体サイズと制御遅延の関係)、第10回〜第11回で角運動量 $L = I\omega$(ヨー回転暴走の防止とモーター停止時の生存確率)を順に解説していく。これらすべての方程式に共通して登場する変数が $\omega$ だ。
つまり、$\omega$ を正確に算出できなければ、このシリーズで扱うあらゆる回転力学の計算が成立しない。第1回で $\omega$ を押さえることは、全60回の物理的な基盤を据えることに等しい。
4.【実務計算】モーター回転数から「制御応答性の証明」まで——ステップバイステップで計算する
ケーススタディの前提条件
ここでは、一般的なクワッドコプター型産業用ドローンを想定する。
| 項目 | 値 |
|---|---|
| 機体重量(バッテリー含む) | 2.5 kg |
| ペイロード | 1.0 kg |
| 全備重量 | 3.5 kg |
| ホバリング時モーター回転数 | $n_{\text{hover}} = 6{,}500$ RPM |
| 最大出力時モーター回転数 | $n_{\text{max}} = 9{,}200$ RPM |
| フライトコントローラー応答時間 | $\Delta t = 0.05$ s |
STEP 1:ホバリング時と最大出力時の角速度 $\omega$ を算出する
まず、カタログ値のRPMを物理計算に使える $\omega$ に変換する。
ホバリング時:
$$\omega_{\text{hover}} = \frac{2\pi \times 6{,}500}{60} = \frac{40{,}840.7}{60} \approx 680.7 ;\text{rad/s}$$
最大出力時:
$$\omega_{\text{max}} = \frac{2\pi \times 9{,}200}{60} = \frac{57{,}805.3}{60} \approx 963.1 ;\text{rad/s}$$
この2つの値の差——約282 rad/s——が、この機体が姿勢制御に使える「回転速度の余裕幅(制御マージン)」だ。車で言えば、巡航速度と最高速度の差が追い越し加速の余力を表すのと同じ構造である。
STEP 2:角加速度 $\alpha$ から制御応答性を評価する
次に、突風への対応能力を定量化する。
フライトコントローラーが突風を検知し、姿勢補正のためにモーター1基の回転数を $\Delta n = 300$ RPM だけ増加させる指令を出したとする。この変化が $\Delta t = 0.05$ 秒で完了する場合、角加速度 $\alpha$(アルファ:角速度の変化率)は次のように計算される。
まず、回転数の変化量を角速度に変換する。
$$\Delta\omega = \frac{2\pi \times 300}{60} \approx 31.4 ;\text{rad/s}$$
次に、角加速度を求める。
$$\alpha = \frac{\Delta\omega}{\Delta t} = \frac{31.4}{0.05} = 628 ;\text{rad/s}^2$$
この $\alpha = 628 ;\text{rad/s}^2$ という数値は、自動車で喩えれば「ブレーキを踏んでから0.05秒で減速が始まる」という反応速度に相当する。フライトコントローラーがこの速度でモーター出力を変化させられることが、突風に対する姿勢維持能力の物理的根拠となる。
STEP 3:この計算が申請書で意味すること
「$\alpha = 628 ;\text{rad/s}^2$、応答時間0.05秒以内」——この数値の組み合わせは、以下のことを審査官に証明する。
「この機体は、突風による外乱を受けた際、0.05秒以内にモーター出力の補正を開始し、姿勢を復元する能力を有する。」
さらに第5回(ニュートンの運動方程式 $F = ma$)と組み合わせることで、「秒速8メートルの突風が機体に当たったとき、横方向に最大で何センチ流されるか」というドリフト距離のシミュレーションへと発展する。審査官が最も恐れる「風に流されたらどうするのか」という問いへの定量的な回答は、この角速度の計算から端を発するのだ。
STEP 4:安全マージンの設定と申請書への実装
実務上の申請書には、以下のような安全マージン表を添付することを推奨する。
| パラメータ | 計算値 | 安全係数 | 申請上の限界値 |
|---|---|---|---|
| ホバリング角速度 $\omega_{\text{hover}}$ | 680.7 rad/s | ×0.85 | 578.6 rad/s |
| 最大角速度 $\omega_{\text{max}}$ | 963.1 rad/s | ×0.80 | 770.5 rad/s |
| 制御応答角加速度 $\alpha$ | 628 rad/s² | — | 確認済み(応答 ≤ 0.05 s) |
| 制御マージン $\Delta\omega$ | 282.4 rad/s | ×0.80 | 225.9 rad/s |
安全係数(0.80〜0.85)は、以下の実運用上の劣化要因を包括的に織り込んだものだ。
- モーターの経年劣化: ベアリング摩耗によるトルク低下(通常、稼働500時間で5〜10%の性能低下が報告されている)
- 気温による電気抵抗変化: 高温環境ではモーターコイルの抵抗が上昇し、同じ電圧でも電流(≒出力)が低下する
- バッテリー残量低下: 残量50%以下で供給電圧が降下し、最大回転数が達成できなくなる
これらの根拠をメーカーデータシートおよび自社の飛行ログと照合した上で申請書に併記すれば、安全係数の「なぜその数字なのか」を審査官に説明できる。根拠のない安全係数は、根拠のない楽観と同じだ。
申請書記載例(参考)
【機体制御能力に関する安全性評価】
本機のBLDCモーター(型番:XXX-4010)のカタログ最大回転数 9,200 RPM を角速度に換算すると $\omega_{\text{max}} = 963.1$ rad/s となる。ホバリング時の必要角速度 $\omega_{\text{hover}} = 680.7$ rad/s に対し、制御マージンは $\Delta\omega = 282.4$ rad/s(約41.5%の余裕)を確保している。
フライトコントローラーの応答時間 0.05 秒における角加速度は $\alpha = 628$ rad/s² であり、突風検知から推力補正開始まで50ミリ秒以内での対応が物理的に確認されている。
上記の値に対し、経年劣化・気温変動・バッテリー電圧降下を考慮した安全係数 0.80〜0.85 を適用し、限界運用条件を設定した。
シリーズ内リンク
| リンク方向 | 記事 |
|---|---|
| → 次回 | 第2回:【トルクと推力】 本回で算出した $\omega$ と角加速度 $\alpha$ を使い、$\tau = I\alpha$ からモーターが発生するトルク(回転力)を計算する。重量級ペイロードを「持ち上げられる」と物理的に証明する方法を解説する。 |
| → 第5回 | 【ニュートンの運動方程式 $F = ma$】 本回の角速度から導かれる推力変化を、機体全体の並進運動(横ドリフト)に変換し、突風時の最大偏位距離を算出する。 |
| → 第8回・第9回 | 【慣性モーメント】 $\omega$ と対になる概念として「回転のしにくさ」を定量化する。大型機が小型機より制御応答が鈍い理由を $I$(慣性モーメント)で証明する。 |
| → 第10回・第11回 | 【角運動量・角運動量保存】 $L = I\omega$ により、モーター1発停止時の機体挙動を予測し、冗長性の証明に繋げる。 |

コメント