

1. 「その機体で、本当にその荷物を持ち上げられるのですか?」
あなたの会社がインフラ点検用の大型ドローンを導入し、5 kgの高精度LiDARセンサーを搭載して橋梁の3Dスキャンを行う業務を受注したとする。機体メーカーのカタログには「最大ペイロード:6 kg」と記載されている。余裕は1 kgある——そう判断して飛行許可の申請書を提出した翌週、航空局の審査官からこう問われる。
「御社の機体は最大ペイロード6 kgとのことですが、その根拠は何ですか? カタログ値ではなく、モーター1基あたりのトルクと推力の関係から、ホバリング時および突風補正時に必要なモーター出力のマージンがどの程度残されているか、定量的にご説明いただけますか?」
沈黙。
「カタログに書いてあります」——その回答は、審査の場では致命傷に等しい。カタログ値とは「理想条件下での最大値」にすぎず、実際の飛行環境(風、気温、バッテリー残量の低下、経年劣化)を一切考慮していない。審査官が知りたいのは「理論上の最大値」ではなく、「実運用条件下で、モーターにどれだけの余力が残されているか」という、物理に基づいた安全マージンの提示だ。
この問いに答えるための鍵が、トルク(torque)と推力(thrust)の関係——すなわち、モーターの回転力がプロペラを介して揚力に変換されるメカニズムの定量的理解である。
第1回で手にした「角速度 ω」という武器は、ここで初めて実戦投入される。ω 単体では「どれだけ速く回っているか」を示すだけだ。しかし、トルクという概念を重ねることで、その回転が「どれだけの力を生み出しているか」——つまり推力の物理的根拠を、審査官の前に数値として提示できるようになる。
トルクを理解していない事業者が陥る典型的な失敗は二つある。
第一に、ペイロードの限界をカタログ値のみで判断し、風速条件を加味しない飛行計画を作成する。突風時にモーター出力が上限に張り付き、姿勢補正の余力がゼロになった瞬間——機体は制御を失う。これは「過積載」ではない。「安全マージンの不在」という、計算で回避できたはずの事故だ。
第二に、モーターの出力特性(トルク-回転数カーブ)を把握せずに機体を選定し、申請段階で審査官から「この機体とこのペイロードの組み合わせにおける、ホバリング時のスロットル使用率は何パーセントですか?」と問われて答えられない。スロットル使用率——これはまさにトルクと推力の計算から導出される指標であり、安全性の最も直感的な尺度の一つだ。
2. 【武器の提示】トルクと推力——回転力を揚力に変換する物理学のギアボックス
本稿で取り扱う概念は二つある。トルク $\tau$(タウ) と 推力 $T$(スラスト) だ。
トルク $\tau$ の定義
トルクとは「回転させる力」の大きさを表す物理量であり、以下のように定義される。
$$\tau = r \times F \quad \text{[N·m(ニュートン・メートル)]}$$
- $\tau$:トルク [N·m]
- $r$:回転軸から力の作用点までの距離(腕の長さ)[m]
- $F$:その点に作用する力 [N]
厳密には力と腕のなす角 $\theta$ を含むベクトル外積($\tau = rF\sin\theta$)だが、モーターシャフトにおいてはプロペラに作用する力は回転方向(接線方向)に働くため、$\sin\theta = 1$ として扱えるケースが大半である。
トルクと角加速度の関係(回転版ニュートン第二法則)
第1回で導入した角速度 $\omega$ と角加速度 $\alpha$ を、トルクと結びつける式がある。これは 回転運動におけるニュートンの第二法則 と呼ばれる。
$$\tau = I \cdot \alpha$$
- $\tau$:トルク [N·m]
- $I$:慣性モーメント [kg·m²](回転体の「回しにくさ」を表す量。第8回・第9回で詳述する)
- $\alpha$:角加速度 [rad/s²]
直線運動における $F = ma$ の回転版だと考えればよい。力 $F$ がトルク $\tau$ に、質量 $m$ が慣性モーメント $I$ に、加速度 $a$ が角加速度 $\alpha$ に対応する。
| 直線運動 | 回転運動 | 意味 |
|---|---|---|
| $F$ [N] | $\tau$ [N·m] | 動かす力 / 回す力 |
| $m$ [kg] | $I$ [kg·m²] | 動かしにくさ / 回しにくさ |
| $a$ [m/s²] | $\alpha$ [rad/s²] | 速度の変化率 |
| $F = ma$ | $\tau = I\alpha$ | 運動の因果関係 |
第1回の末尾で予告した通り、この $\tau = I \cdot \alpha$ こそが、角速度の計算を「推力の制御能力の証明」へとステップアップさせる接続式だ。
推力 $T$ の定義
推力は「プロペラが空気を押し下げることで生じる上向きの力」である(第3回で解説した作用・反作用の法則そのものだ)。推力の簡易モデルとして、モーター回転数の二乗に比例する関係がある。
$$T = k_T \cdot \omega^2 \quad \text{[N]}$$
- $T$:1基あたりの推力 [N]
- $k_T$:推力係数(プロペラの形状・サイズ・空気密度で決まる定数)[N·s²/rad²]
- $\omega$:角速度 [rad/s]
同様に、モーターが空気に与えるトルク(反トルク)もまた角速度の二乗に比例する。
$$Q = k_Q \cdot \omega^2 \quad \text{[N·m]}$$
- $Q$:1基あたりの反トルク(プロペラが空気から受ける回転抵抗)[N·m]
- $k_Q$:トルク係数 [N·m·s²/rad²]
この $k_T$ と $k_Q$ は実測値またはメーカーデータシートから得る。カタログに明記されていない場合は、推力テストスタンド(スラストベンチ)での実測が必要となる。
要点: 推力はモーター回転数(角速度)の二乗に比例する。これは、回転数を10%増やせば推力は約21%増える($1.10^2 = 1.21$)ことを意味し、逆に回転数が10%低下すれば推力は約19%失われることを意味する。バッテリー残量低下による回転数の「わずかな」低下が、推力に「大きな」影響を及ぼす——この非線形性を理解していることが、安全マージン設計の核心となる。
3. トルクから推力が生まれるまでの力学的連鎖
3-1. モーター → プロペラ → 空気 → 揚力:力の伝達経路
トルクが推力に変換される過程は、以下の力学的連鎖として理解できる。
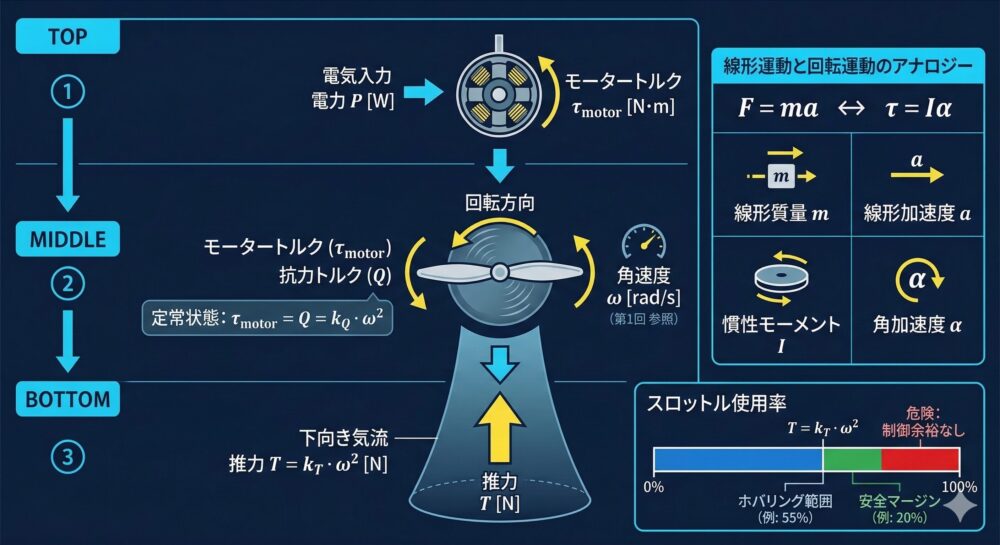
① モーターが電気エネルギーをトルク(回転力)に変換する。 モーターはバッテリーから供給された電力を、シャフトの回転運動に変換する。このとき生じるトルク $\tau_{\text{motor}}$ が、プロペラを回転させる駆動力だ。
② トルクがプロペラを加速し、角速度 $\omega$ を維持する。 定常回転(ホバリング時)においては、モーターが供給するトルクと、プロペラが空気から受ける抵抗トルク(反トルク $Q$)が釣り合っている。
$$\tau_{\text{motor}} = Q = k_Q \cdot \omega^2$$
この平衡状態で角速度 $\omega$ が一定に保たれる。回転数を上げたい場合はモーターに追加のトルクを投入し、$\tau_{\text{motor}} > Q$ とすることで角加速度 $\alpha$ が発生する($\tau_{\text{net}} = I \cdot \alpha$)。
③ 回転するプロペラが空気を加速し、推力を生む。 第3回で解説した運動量理論($T = \dot{m} \cdot \Delta v$)が示す通り、プロペラブレードは空気に下向きの速度変化を与え、その反作用として上向きの推力 $T$ が発生する。プロペラの設計パラメータ(ピッチ角、翼形状、直径)が $k_T$ を決定し、同じ回転数でもプロペラが異なれば推力は大きく異なる。
3-2. 推力係数 $k_T$ とトルク係数 $k_Q$ の実務的な意味
$k_T$ と $k_Q$ は「プロペラの性能を凝縮した一つの数字」だ。
たとえば同じモーターに小径・高ピッチのプロペラを装着すれば $k_T$ は小さく(低推力だが高速回転)、大径・低ピッチのプロペラを装着すれば $k_T$ は大きくなる(高推力だが低速回転)。重量級ペイロードを持ち上げるには「大きな $k_T$」が有利だが、同時に $k_Q$ も増大するため、モーターの許容トルクを超えない範囲でのバランスが求められる。
この $k_T / k_Q$ の比は、プロペラの「効率」に直結する指標でもある。推力を得るためにどれだけのトルク(=エネルギー)を消費するか——第18回で扱う「仕事とエネルギー」の文脈で、バッテリー寿命との関係を再び議論する。
3-3. なぜ「トルクの理解」が安全マージンの鍵なのか
ドローンが安全にホバリングするためには、以下の条件が同時に満たされていなければならない。
条件1:推力 ≥ 重力(浮いていること)
$$\sum T_i = N \cdot k_T \cdot \omega^2 \geq m \cdot g$$
($N$:ローター数、$m$:全備重量)
条件2:姿勢補正用のトルク余力が存在すること(制御できること)
ホバリング時のモーター出力が上限の100%に達していた場合、突風に対する姿勢補正のために一部のモーターの回転数を上げようとしても、上げる余地がない。これが「スロットルヘッドルーム(throttle headroom)の枯渇」であり、制御喪失の直接的原因となる。
安全な飛行計画とは、条件1を満たした上で、条件2の余力を確保する計画のことだ。そして、その余力を定量化するのが、トルクと推力の計算に他ならない。
4. 【実務計算】ペイロード搭載時の推力マージンとスロットルヘッドルームの算出
ケーススタディ:全備重量 8 kg のクワッドコプターに5 kgのLiDARを搭載する
以下の条件で、ホバリング時のモーター負荷率(スロットル使用率)と、姿勢補正用の余力を算出する。
【機体スペック(仮定値)】
| パラメータ | 記号 | 値 |
|---|---|---|
| 機体重量(バッテリー含む) | $m_{\text{body}}$ | 8.0 kg |
| ペイロード(LiDAR) | $m_{\text{payload}}$ | 5.0 kg |
| 全備重量 | $m$ | 13.0 kg |
| ローター数 | $N$ | 4 |
| プロペラ推力係数 | $k_T$ | $1.2 \times 10^{-4}$ N·s²/rad² |
| モーター最大角速度 | $\omega_{\text{max}}$ | 900 rad/s(≒ 8,594 RPM) |
STEP 1:ホバリングに必要な総推力を求める
$$T_{\text{required}} = m \cdot g = 13.0 \times 9.81 = 127.53 \text{ [N]}$$
1基あたりの必要推力は:
$$T_{\text{per motor}} = \frac{127.53}{4} = 31.88 \text{ [N]}$$
STEP 2:ホバリングに必要な角速度 $\omega_{\text{hover}}$ を求める
推力と角速度の関係式 $T = k_T \cdot \omega^2$ を $\omega$ について解く。
$$\omega_{\text{hover}} = \sqrt{\frac{T_{\text{per motor}}}{k_T}} = \sqrt{\frac{31.88}{1.2 \times 10^{-4}}}$$
$$= \sqrt{265,667} \approx 515.4 \text{ [rad/s]}$$
RPMに逆変換すると:
$$n_{\text{hover}} = \frac{\omega_{\text{hover}} \times 60}{2\pi} = \frac{515.4 \times 60}{6.2832} \approx 4{,}923 \text{ RPM}$$
STEP 3:スロットル使用率(ホバリング負荷率)を算出する
スロットル使用率は、ホバリング時の角速度と最大角速度の比から求まる。ただし推力が $\omega^2$ に比例するため、スロットル使用率は角速度の二乗比(=推力比)で評価する。
$$\text{スロットル使用率} = \left(\frac{\omega_{\text{hover}}}{\omega_{\text{max}}}\right)^2 = \left(\frac{515.4}{900}\right)^2 = (0.5727)^2 \approx 0.328$$
ホバリング時のスロットル使用率 ≒ 32.8%
これが意味すること——モーター最大推力のうち、ホバリングに消費されているのは約33%であり、残りの約67%が姿勢補正・突風対応・緊急上昇のための余力として確保されている。
STEP 4:突風時に必要な追加推力と、余力の十分性を検証する
第5回で詳述するが、突風によって機体が傾斜した際、フライトコントローラーは風上側のモーター回転数を増加させて姿勢を復元する。ここでは簡易的な評価として、「一時的に全備重量の1.5倍の推力が必要になる」シナリオ(急激な姿勢回復時)を想定する。
$$T_{\text{gust}} = 1.5 \times T_{\text{required}} = 1.5 \times 127.53 = 191.30 \text{ [N]}$$
1基あたりの必要推力:
$$T_{\text{gust, per motor}} = \frac{191.30}{4} = 47.82 \text{ [N]}$$
このときの角速度:
$$\omega_{\text{gust}} = \sqrt{\frac{47.82}{1.2 \times 10^{-4}}} = \sqrt{398,500} \approx 631.3 \text{ [rad/s]}$$
スロットル使用率:
$$\left(\frac{631.3}{900}\right)^2 = (0.7014)^2 \approx 0.492$$
突風対応時のスロットル使用率 ≒ 49.2%
最大出力の約半分で突風対応が完了するということは、まだ50%以上のヘッドルームが残っている。これは「安全」と判断できる水準だ。
STEP 5:ペイロードを増加させた場合の限界を探る
では、ペイロードをさらに増やして「カタログ上の最大ペイロード6 kg」にした場合はどうなるか。
$$m_{\text{max}} = 8.0 + 6.0 = 14.0 \text{ kg}$$
$$T_{\text{required}} = 14.0 \times 9.81 = 137.34 \text{ N}$$
ホバリング時スロットル使用率:
$$\omega_{\text{hover}} = \sqrt{\frac{137.34 / 4}{1.2 \times 10^{-4}}} = \sqrt{\frac{34.34}{1.2 \times 10^{-4}}} = \sqrt{286,125} \approx 535.0 \text{ [rad/s]}$$
$$\text{使用率} = \left(\frac{535.0}{900}\right)^2 \approx 0.353 = 35.3%$$
突風対応時(1.5倍):
$$\omega_{\text{gust}} = \sqrt{\frac{1.5 \times 137.34 / 4}{1.2 \times 10^{-4}}} = \sqrt{429,188} \approx 655.1 \text{ [rad/s]}$$
$$\text{使用率} = \left(\frac{655.1}{900}\right)^2 \approx 0.530 = 53.0%$$
ペイロードを最大にしても突風対応時に53%——まだ余力はある。しかし、ここにバッテリー残量低下(第18回で詳述)やモーター経年劣化による最大出力の低減(仮に10%低下とすると $\omega_{\text{max}} = 810$ rad/s)を織り込むと:
$$\text{劣化後の突風対応時使用率} = \left(\frac{655.1}{810}\right)^2 \approx 0.654 = 65.4%$$
さらに、夏場の高温・高高度環境で空気密度が低下(第32回・第33回で詳述)し、同じ推力を得るためにより高い回転数が必要になると、使用率はさらに上昇する。複合的な悪条件の重畳を想定すると、カタログ上の「最大6 kg」で安全マージンが十分かどうかは、自明ではない。
ここに「カタログ値を鵜呑みにしてはならない」という実務的教訓がある。安全マージンは、トルクと推力の計算によって、条件ごとに自分で導出するものだ。
安全マージンの設定と申請書への実装
上記の計算を、飛行許可申請書の「安全性評価」セクションに以下の形式で記載する。
| 評価項目 | LiDAR搭載時(5 kg) | 最大ペイロード時(6 kg) | 安全判定基準 |
|---|---|---|---|
| ホバリング時スロットル使用率 | 32.8% | 35.3% | ≤ 50% を推奨 |
| 突風対応時スロットル使用率(1.5倍推力) | 49.2% | 53.0% | ≤ 70% を推奨 |
| 劣化+突風(ワーストケース) | — | 65.4% | ≤ 80% を上限 |
| ホバリング時角速度 | 515.4 rad/s | 535.0 rad/s | 参考値 |
| スロットルヘッドルーム(通常時) | 67.2% | 64.7% | ≥ 30% を推奨 |
推奨記載文言(申請書用):
「本機体は、LiDARセンサー(5.0 kg)搭載時のホバリングにおいて、モーター最大推力の約33%を使用し、残余推力マージンは約67%確保される。突風応答シナリオ(全備重量の1.5倍推力発生時)においてもスロットル使用率は約49%にとどまり、姿勢制御のためのヘッドルームは十分に確保されていることが、$T = k_T \cdot \omega^2$ に基づく推力計算により確認された。」
この一文が申請書に記載されているだけで、審査官に「この事業者はモーター出力の余力を物理的に把握している」という強力な信頼感を与える。第1回で算出した角速度 $\omega$ が、ここで「推力の定量的証明」として実を結んだことになる。
シリーズ内の位置づけと次回への接続
本稿で扱ったトルクと推力の関係は、第1フェーズ「機体の制御と剛体の力学」における基礎的な力学ツールの一つである。
第1回の「角速度 $\omega$」→ 本稿の「トルク $\tau$ と推力 $T = k_T \omega^2$」という流れは、ニュートン力学の三法則へと直結する。第3回では作用・反作用の法則からダウンウォッシュの危険性を定量化し、第4回では慣性の法則から制動距離を算出し、第5回では $F = ma$ を用いて突風時の横方向ドリフト量を完全にシミュレーションする。
また、本稿で「慣性モーメント $I$ は第8回・第9回で詳述する」と述べた通り、$\tau = I \cdot \alpha$ の式における $I$ の値——すなわち「プロペラやモーターの回転体がどれだけ回しにくいか」は、機体サイズの拡大やジンバル搭載時に劇的に変化する。大型機の制御遅延やペイロード配置の最適化を議論するために、まず本稿でトルクの基礎を押さえておくことが不可欠だ。

コメント